|



ЭНЦИКЛОПЕДИЯ РАДИОЭЛЕКТРОНИКИ И ЭЛЕКТРОТЕХНИКИ Микроконтроллерный регулятор частоты вращения коллекторного электродвигателя. Энциклопедия радиоэлектроники и электротехники
Энциклопедия радиоэлектроники и электротехники / Электродвигатели Во многих приводах, в частности бытовых электроприборов, широко применяются коллекторные электродвигатели с последовательным возбуждением. Известны многочисленные варианты регуляторов частоты вращения таких двигателей с использованием управляемых выпрямителей на тиристорах (см., например, книгу "Тиристоры. Технический справочник"/Пер. с англ. В. А. Лабунцова и др. - М.: Энергия, 1971). Применение в указанных устройствах микроконтроллеров (МК) с реализацией основных функций управления электроприводом на программном уровне открывает качественно новые возможности. Регулятор при этом получается достаточно универсальным с возможностью настройки на управление различными вариантами электроприводов или других нагрузок изменением записанной в памяти МК программы. В статье описывается разработанный авторами вариант такого регулятора на базе МК PIC16F84 фирмы Microchip Technology. В предлагаемом устройстве использован импульсный метод регулирования напряжения в цепях постоянного тока, получивший широкое распространение, в частности, в электроприводе транспортных средств [1]. Суть метода заключается в том, что напряжение на двигатель подается импульсами с большой частотой следования посредством бесконтактного ключевого элемента. В течение импульса продолжительностью tи (рис. 1) к электродвигателю приложено полное напряжение источника питания U и ток в цепи двигателя нарастает, а в течение паузы tn напряжение отключено, а ток под действием ЭДС самоиндукции постепенно спадает, замыкаясь через цепь блокирующего диода. Среднее значение напряжения Ucp на зажимах электродвигателя, а следовательно, и его частоту вращения регулируют изменением коэффициента заполнения К3, равного отношению длительности импульса tи к периоду коммутации Т=tи + tn: UCP = K3U; K3 = tи /T. (1)
Для уменьшения амплитуды пульсаций тока и расширения диапазона регулирования применено широтно-частотное управление ключевым элементом с одновременным изменением продолжительности периода коммутации согласно соотношению Т = Тмин/4К3(1-К3), (2) где Тмин - минимально допустимое время коммутации, определяемое характеристиками ключевого элемента и быстродействием микроконтроллера; в данной случае Тмин принято равным 2,5 мс. Для демонстрации возможностей микроконтроллерного управления электроприводом в предлагаемом устройстве реализован следующий набор выполняемых функций: - регулирование частоты вращения изменением коэффициента заполнения К3 в интервале 0...100 % с шагом 2 %. Механическая характеристика электропривода (зависимость частоты вращения от момента на валу) при этом мягкая: с ростом нагрузки частота вращения снижается, что защищает электродвигатель и источник питания от перегрузок; - поддержание заданной частоты вращения с точностью ±5 % с использованием принципа замкнутого управления по отклонению: фактическое значение частоты вращения сравнивается с заданным, и при наличии отклонения программно изменяется К3 до устранения возникшего отклонения; - изменение направления вращения вала (реверс) электродвигателя; - формирование сигнала на включение тормозного элемента при остановке привода; - автоматическое отключение электродвигателя по сигналам датчиков аварийного режима (при использовании таковых), а также при сбоях в выполнении программы; - возможность управления двумя электродвигателями с временным сдвигом импульсов питающего напряжения; - учет и хранение в энергонезависимой памяти МК информации о суммарном времени работы привода; - визуальная индикация выбранного алгоритма управления (со стабилизацией частоты вращения или без нее) и направления вращения, а также величин коэффициента заполнения, заданной и фактической частот вращения. В конкретных применениях некоторые из названных функций могут не использоваться. Принципиальная схема устройства управления электродвигателем изображена на рис. 2. Его основа - МК DD1, работающий на тактовой частоте 10 МГц. Органами управления являются кнопки SB1 ("Вперед"), SB2 ("Стоп") и SB3 ("Назад"), подсоединенные к разрядам RB0 - RB2 порта В МК. Параллельно кнопке SB2 при необходимости можно подключить выход датчика тока нагрузки, который при превышении установленного токового порога будет отключать привод от источника питания.
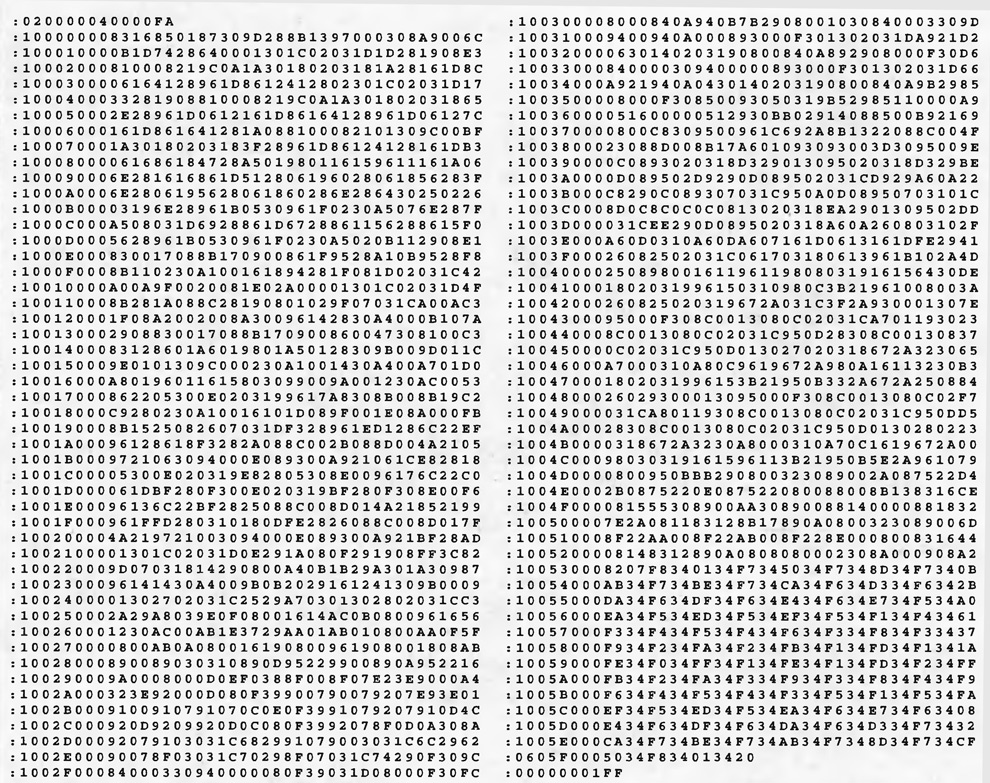
В качестве ключевого элемента применен мощный составной транзистор КТ834В (VT2). Благодаря большому коэффициенту передачи тока базы управление им осуществляется непосредственно напряжением с выхода RB4 порта В через токоограничительный резистор R5. Программой управления предусмотрена возможность одновременного управления вторым электродвигателем с подсоединением входа аналогичного ключевого элемента к выводу RB5. При этом с целью уменьшения пульсаций тока в цепи источника импульсы напряжения для второго двигателя формируются с временным сдвигом, равным продолжительности импульса tи, как показано на рис. 1, а и б. В качестве ключей в устройстве можно применить мощные полевые или гибридные силовые транзисторы с подключением цепей управления непосредственно к выводам МК [2], что позволяет использовать регулятор в силовых электроприводах мощностью до сотен киловатт, например, в электрифицированных транспортных средствах. Реверс электродвигателя осуществляется изменением направления тока в обмотке возбуждения электродвигателя LM1 с помощью переключающих контактов реле К1. Его обмотка включена в коллекторную цепь транзистора VT1, управляемого напряжением с выхода RB3 МК. В регуляторе применено реле РЭН18 (паспорт РХ4.564.505) с четырьмя переключающими контактами (для повышения надежности в каждой из групп К1.1 и К1.2 параллельно соединены по два контакта). Переключение контактов происходит при обесточенном электродвигателе (К3 = 0), что существенно снижает требования к их коммутационной способности. В зависимости от номинального тока электродвигателя для переключения обмотки возбуждения может потребоваться применение более мощного коммутационного устройства. При управлении нереверсивным электроприводом необходимость в использовании указанных элементов вообще отпадает. Программой предусмотрено формирование на выходе RB6 МК сигнала, включающего тормозной элемент для быстрой остановки привода при выключении либо для ограничения частоты вращения в режиме стабилизации при отрицательных нагрузках на валу электродвигателя. Если такого элемента нет, указанный сигнал просто не используют. На вывод RB7 поступают импульсы от фотоэлектрического датчика частоты вращения. Он состоит из излучающего диода ИК диапазона VD5, фотодиода VD6, усилителя на транзисторе VT3 [3] и закрепленного на валу электродвигателя диска с двумя диаметрально расположенными отверстиями диаметром около 10 мм. При вращении вала ИК лучи дважды за один оборот на короткое время освещают фотодиод, и в цепи коллектора транзистора VT3 формируются импульсы напряжения. Поступая на вход RB7, они вызывают прерывания МК от порта В. По этим прерываниям МК измеряет время каждого оборота вала двигателя и переводит измеренный интервал в частоту вращения, нормированную относительно номинальной в процентах. В данном случае за 100 % принята частота вращения 3000 мин-1. Если коэффициент заполнения достиг нуля (отключение питания), а двигатель продолжает вращаться с угловой частотой, превышающей заданную, МК выдает исполнительному устройству команду на торможение через разряд RB6 порта В. Настроенный на вывод пятиразрядный порт А используется для управления в динамическом режиме семью разрядами цифрового индикатора HG1. Через разряд RA3 на вход С1 двоичного счетчика DD3 поступает информация (в виде соответствующего числа импульсов) об отображаемой десятичной цифре, а через разряд RA4 осуществляется обнуление счетчика. Дешифратор DD4 преобразует двоичный код на выходе счетчика в код семиэлементного индикатора. С выводов RAO-RA2 МК на адресные входы дешифратора DD2 поступает в двоичном коде номер разряда индикатора HG1, в котором должно отображаться содержимое счетчика DD4. Напряжения на выходах 0 - 6 дешифратора последовательно активизируют соответствующие разряды индикатора, обеспечивая отображение семи цифр, а в интервалах формирования напряжения на неиспользуемом выходе дешифратора индикация отключена и производится загрузка отображаемой цифры в счетчик. При включении устройства происходит автоматический сброс МК и начинается выполнение записанной в его памяти программы. Производится начальная инициализация МК и управляющей программы: настраиваются предделитель таймера/счетчика и линии портов А и В на ввод/вывод, заносятся необходимые начальные константы в используемые переменные, разрешаются прерывания от таймера/счетчика и от изменения уровня входного напряжения в разряде RB7 порта В. После этих действий программа циклически выводит информацию на цифровой индикатор HG1 и опрашивает состояния кнопок SB1-SB3. Управление электроприводом может происходить по двум алгоритмам, выбираемым пользователем. Включен режим стабилизации. Пользователь задает необходимую частоту вращения вала двигателя, а МК несколько раз в секунду измеряет реальную частоту вращения и в зависимости от результата корректирует коэффициент заполнения К3 таким образом, чтобы поддерживать заданную частоту независимо от перепадов питающего напряжения и изменения момента сопротивления на валу электродвигателя. Для включения режима стабилизации необходимо при остановленном приводе нажать одновременно кнопки SB2 ("Стоп") и SB1 ("Вперед"), для выключения - SB2 ("Стоп") и SB3 ("Назад"). На индикатор в этом режиме выводится информация в формате 5_XXX_YYV, где 5 - признак того, что МК работает в режиме стабилизации, XXX - текущий коэффициент заполнения в процентах от 0 до 100 % с шагом 2 %, сформированный МК для поддержания заданной частоты вращения, a YYY - заданная частота вращения привода в процентах от номинальной в интервале от 0 до 100 % с шагом 5 %. Режим стабилизации отключен. Пользователь задает необходимый коэффициент заполнения К3. Сигнал обратной связи по частоте вращения не используется. На индикатор выводится информация в формате XXX_YYY, где XXX - измеренная текущая частота вращения вала электродвигателя (измеряется несколько раз в секунду), a YYY - заданный коэффициент заполнения К3 от 0 до 100 % с шагом 2 %. С помощью встроенного в МК таймера/счетчика программа подсчитывает отработанное двигателем время в минутах, периодически сохраняя его значение в энергонезависимой памяти данных. Соответствующая информация выводится на индикатор после нажатия на кнопку SB2 при остановленном приводе. По достижении счетчиком минут значения 8192 (около 136,5 ч) происходит его обнуление. Импульсы управления двумя силовыми ключами формируются МК на выходах RB4, RB5 по прерываниям от таймера/счетчика в последовательности, приведенной на рис. 1. Как следствие, при К3 ≤ 0,5 в каждый момент к источнику питания подключен только один из двух двигателей, а при К3 > 0,5 происходит частичное наложение токов потребления электродвигателей, что улучшает режим работы источника питания. Константы, необходимые для формирования временных интервалов согласно соотношениям (1), (2) и рис. 1, загружаются в таймер из таблицы, размещенной в памяти программ МК. Адрес в таблице определяется по требуемой величине коэффициента заполнения К3. Коды "прошивки" ПЗУ МК приведены в таблице.
В случае непредвиденного поведения управляющей программы, вызванного любыми причинами, по команде сторожевого таймера производятся сброс МК и экстренная остановка привода. При программировании МК в байте конфигурации должна быть указана следующая информация: тип генератора - HS, Watchdog timer и Power-up timer - включены. Программа рассчитана на максимально допустимую частоту вращения 3000 мин -1 Для изменения этого значения нужно задать другие константы в процедуре ее измерения (см. комментарии в тексте исходной программы). Кроме того, значение максимальной частоты вращения можно ступенчато изменять, варьируя число отверстий в диске таходатчика. Например, для получения максимальной частоты 1500 мин -1 необходимо просверлить четыре отверстия. Для питания низковольтной части регулятора можно использовать любой маломощный источник, обеспечивающий напряжение 5 В при токе до 150 мА. МК PIC16F84 без изменений в управляющей программе может быть заменен более дешевым PIC16C84, также рассчитанным на работу с тактовой частотой 10 МГц. В качестве цифрового индикатора HG1 можно использовать любой другой с аналогичным управлением. Диоды выпрямительного моста VD3, транзистор VT2 и контакты реле К1 определяют максимальную мощность привода, который может управляться регулятором. Регулятор был испытан в работе с универсальным коллекторным электродвигателем мощностью 400 Вт. При этом транзистор VT2 был установлен на теплоотводе с общей площадью охлаждающей поверхности около 100 см2. Правильно собранный из исправных компонентов регулятор при безошибочно запрограммированном МК не нуждается в наладке. Описанное устройство можно использовать не только для управления частотой вращения электроприводов, но и для поддержания заданных значений других физических параметров, например, температуры в комнате, инкубаторе, бассейне, аквариуме или других объектах. В подобном случае вместо датчика частоты вращения к входу RB7 МК подключают преобразователь температура-частота. Неиспользуемые разряды порта В можно запрограммировать на управление другими внешними устройствами, например, включающими вентиляцию в помещении при перегреве воздуха, освещение и компрессор в аквариуме через определенные интервалы времени и т. п. Все это требует внесения минимальных изменений в программу управления. Литература
Автор: С.Коряков, Ю.Сташинов, г.Шахты Ростовской обл.
Чувства кота, ожидаюшего возвращения хозяина
16.07.2026 Целесообразность приема пробиотиков после курса антибиотиков
16.07.2026 Резкое похудение и возврат веса могут навредить сердцу
15.07.2026
▪ Крупнейший айсберг начал дрейфовать ▪ Гарнитура Xiaomi Mi USB Type-C с активным шумоподавлением ▪ Объективной реальности не существует ▪ Улицу освещают солнце и ветер ▪ 3D-печать шоколадных десертов
▪ раздел сайта Дом, приусадебное хозяйство, хобби. Подборка статей ▪ статья Шовинизм. Крылатое выражение ▪ статья Как появилось плавание? Подробный ответ ▪ статья Теликрания белая. Легенды, выращивание, способы применения ▪ статья Фазометр на ОУ. Энциклопедия радиоэлектроники и электротехники ▪ статья Появление голубя из шкатулки. Секрет фокуса
Главная страница | Библиотека | Статьи | Карта сайта | Отзывы о сайте
www.diagram.com.ua |


 Оставьте свой комментарий к этой статье:
Оставьте свой комментарий к этой статье: