|



ИСТОРИЯ ТЕХНИКИ, ТЕХНОЛОГИИ, ПРЕДМЕТОВ ВОКРУГ НАС
Робот. История изобретения и производства
Справочник / История техники, технологии, предметов вокруг нас Робот - автоматическое устройство, созданное по принципу живого организма. Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком (либо животными). При этом робот может как и иметь связь с оператором (получать от него команды), так и действовать автономно.
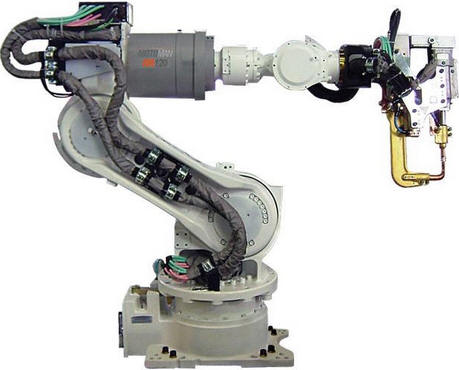
Роботом называют автоматическое устройство, имеющее манипулятор - механический аналог человеческой руки - и систему управления этим манипулятором. Обе эти составные части могут иметь различное устройство - от очень простого до чрезвычайно сложного. Манипулятор обычно состоит из шарнирно соединенных звеньев, как рука человека состоит из костей, связанных суставами, и заканчивается охватом, который является чем-то вроде кисти человеческой руки.
Звенья манипулятора подвижны друг относительно друга и могут совершать вращательные и поступательные движения. Иногда вместо схвата последним звеном манипулятора служит какой-нибудь рабочий инструмент, например, дрель, гаечный ключ, краскораспылитель или сварочная горелка. Перемещение звеньев манипулятора обеспечивают так называемые приводы - аналоги мускулов в руке человека. Обычно в качестве таковых используются электродвигатели. Тогда привод включает в себя еще редуктор (систему зубчатых передач, которые снижают число оборотов двигателя и увеличивают вращающие моменты) и электрическую схему управления, регулирующую скорость вращения электродвигателя.
Кроме электрического часто применяется гидравлический привод. Действие его очень просто. В цилиндр 1, в котором находится поршень 2, соединенный с помощью штока с манипулятором 3, поступает под давлением жидкость, которая передвигает поршень в ту или иную сторону, а вместе с ним и "руку" робота. Направление этого движения определяется тем, в какую часть цилиндра (в пространство над поршнем или под ним) попадает в данный момент жидкость. Гидропривод может сообщить манипулятору и вращательное движение. Точно так же действует пневматический привод, только вместо жидкости здесь применяется воздух. Таково в общих чертах устройство манипулятора. Что касается сложности задач, которые может разрешать тот или иной робот, то они во многом зависят от сложности и совершенства управляющего устройства. Вообще, принято говорить о трех поколениях роботов: промышленных, адаптивных и роботах с искусственным интеллектом. Самые первые образцы простых промышленных роботов были созданы в 1962 году в США. Это были "Версатран" фирмы "АМФ Версатран" и "Юнимейт" фирмы "Юнимейшн Инкорпорейтед". Эти роботы, а также те, что последовали за ними, действовали по жесткой, не меняющейся в процессе работы программе и были предназначены для автоматизации несложных операций при неизменном состоянии окружающей среды.
В качестве управляющего устройства для таких роботов мог служить, например, "программируемый барабан". Действовал он так: на цилиндре, вращаемом электродвигателем, размещались контакты приводов манипулятора, а вокруг барабана - токопроводящие металлические пластины, замыкавшие эти контакты, когда те их касались. Расположение контактов было таким, чтобы при вращении барабана приводы манипулятора включались в нужное время, и робот начинал выполнять запрограммированные операции в нужной последовательности. Точно так же управление могло осуществляться с помощью перфокарты или магнитной ленты. Очевидно, что даже малейшее изменение окружающей обстановки, малейший сбой в технологическом процессе, ведет к нарушению действий такого робота. Однако они обладают и немалыми преимуществами - они дешевы, просты, легко перепрограммируются и вполне могут заменить человека при выполнении тяжелых однообразных операций. Именно на такого типа работах и были впервые применены роботы. Они хорошо справлялись с простыми технологическими повторяющимися операциями: выполняли точечную и дуговую сварку, осуществляли загрузку и разгрузку, обслуживали прессы и штампы. Робот "Юнимейт", например, был создан для автоматизации контактной точечной сварки кузовов легковых автомобилей, а робот типа "SMART" устанавливал колеса на легковые автомобили. Однако принципиальная невозможность автономного (без вмешательства человека) функционирования роботов первого поколения очень затрудняла их широкое внедрение в производство. Ученые и инженеры настойчиво старались устранить этот недостаток. Результатом их трудов стало создание гораздо более сложных адаптивных роботов второго поколения. Отличительная черта этих роботов состоит в том, что они могут изменять свои действия в зависимости от окружающей обстановки. Так, при изменении параметров объекта манипулирования (его угловой ориентации или местоположения), а также окружающей среды (скажем, при появлении каких-то препятствий на пути движения манипулятора) эти роботы могут соответственно спроектировать свои действия. Понятно, что, работая в изменяющейся среде, робот должен постоянно получать о ней информацию, иначе он не сможет ориентироваться в окружающем пространстве. В связи с этим адаптивные роботы имеют значительно более сложную, чем роботы первого поколения, систему управления. Эта система распадается на две подсистемы: 1) сенсорную (или очувствления) - в нее входят те устройства, которые собирают информацию о внешней окружающей среде и о местоположении в пространстве различных частей робота; 2) ЭВМ, которая анализирует эту информацию и в соответствии с ней и заданной программой управляет перемещением робота и его манипулятора. К сенсорным устройствам относятся тактильные датчики осязания, фотометрические датчики, ультразвуковые, локационные, а также различные системы технического зрения. Последние имеют особенно важное значение. Главная задача технического зрения (собственно "глаза" робота) состоит в том, чтобы преобразовать изображения объектов окружающей среды в электрический сигнал, понятный для ЭВМ. Общий принцип систем технического зрения состоит в том, что с помощью телевизионной камеры в ЭВМ передается информация о рабочем пространстве. ЭВМ сравнивает ее с имеющимися в памяти "моделями" и выбирает соответствующую обстоятельствам программу. На этом пути одна из центральных проблем при создании адаптивных роботов заключалась в том, чтобы научить машину распознавать образы. Из многих объектов робот должен выделить те, которые ему необходимы для выполнения каких-то действий. То есть он должен уметь различать признаки объектов и классифицировать объекты по этим признакам. Это происходит благодаря тому, что робот имеет в памяти прототипы образов нужных объектов и сравнивает с ними те, что попадают в поле его зрения. Обычно задача "узнавания" нужного объекта распадается на несколько более простых задач: робот ищет в окружающей среде нужный предмет путем изменения ориентации своего взгляда, измеряет дальность до объектов наблюдения, автоматически подстраивает чувствительный видеодатчик в соответствие с освещенностью предмета, сравнивает каждый предмете "моделью", которая хранится в его памяти, по нескольким признакам, то есть выделяет контуры, текстуру, цвет и другие признаки. В результате всего этого происходит "узнавание" объекта. Следующим этапом работы адаптивного робота обычно являются какие-то действия с этим предметом. Робот должен приблизиться к нему, захватить и переставить на другое место, притом не как попало, а определенным образом. Чтобы выполнить все эти сложные манипуляции, одних знаний об окружающей обстановке недостаточно - робот должен точно контролировать каждое свое движение и как бы "ощущать" себя в пространстве. С этой целью кроме сенсорной системы, отражающей внешнюю среду, адаптивный робот оснащается сложной системой внутренней информации: внутренние датчики постоянно передают ЭВМ сообщения о местоположении каждого звена манипулятора. Они как бы дают машине "внутреннее чувство". В качестве таких внутренних датчиков могут использоваться, например, высокоточные потенциометры.
Высокоточный потенциометр представляет собой прибор типа хорошо известного реостата, но отличающийся более высокой точностью. В нем вращающийся контакт не перескакивает с витка на виток, как при смещении ручки обычного реостата, а следует вдоль самих витков провода. Потенциометр крепится внутри манипулятора, так что при повороте одного звена относительно другого подвижный контакт тоже смещается и, следовательно, сопротивление прибора изменяется. Анализируя величину его изменения, ЭВМ судит о местоположении каждого из звеньев манипулятора. Скорость перемещения манипулятора связана со скоростью вращения электродвигателя в приводе. Имея всю эту информацию, ЭВМ может измерить скорость движения манипулятора и руководить его перемещением. Каким же образом робот "планирует" свое поведение? В этой способности нет ничего сверхъестественного - "сообразительность" машины всецело зависит от сложности составленной для нее программы. В памяти ЭВМ адаптивного робота обычно заложено столько различных программ, сколько может возникнуть различных ситуаций. Пока ситуация не меняется, робот действует по базовой программе. Когда же внешние датчики сообщают ЭВМ об изменении ситуации, она анализирует ее и выбирает ту программу, которая более соответствует данной ситуации. Имея общую программу "поведения", запас программ для каждой отдельной ситуации, внешнюю информацию об окружающей среде и внутреннюю информацию о состоянии манипулятора, ЭВМ руководит всеми действиями робота. Первые модели адаптивных роботов появились фактически одновременно с промышленными роботами. Прообразом для них послужил автоматически действующий манипулятор, разработанный в 1961 году американским инженером Эрнстом и названный впоследствии "рукой Эрнста". Этот манипулятор имел захватывающее устройство, снабженное различными датчиками - фотоэлектрическими, тактильными и другими. С помощью этих датчиков, а также управляющей ЭВМ он находил и брал заданные ему произвольно расположенные предметы. В 1969 году в Стэнфордском университете (США) был создан более сложный робот "Шейки". Эта машина также обладала техническим зрением, могла распознавать окружающие предметы и оперировать ими по заданной программе.
Робот приводился в движение с помощью двух шаговых электродвигателей, имеющих независимый привод к колесам на каждой стороне тележки. В верхней части робота, которая могла поворачиваться вокруг вертикальной оси, были установлены телевизионная камера и оптический дальномер. В центре располагался блок управления, который распределял команды, поступающие от ЭВМ к механизмам и устройствам, реализующим соответствующие действия. По периметру устанавливались сенсорные датчики для получения информации о столкновении робота с препятствиями. "Шейки" мог перемещаться по кратчайшему пути в заданное место помещения, вычисляя при этом траекторию таким образом, чтобы избежать столкновения (он воспринимал стены, двери, дверные проемы). ЭВМ из-за своих больших габаритов находилась отдельно от робота. Связь между ними осуществлялась по радио. Робот мог выбирать нужные предметы и перемещать их "толканием" (манипулятора у него не было) в нужное место. Позже появились другие модели. Например, в 1977 году фирмой "Quasar Industries" был создан робот, который умел подметать полы, вытирать пыль с мебели, работать с пылесосом и удалять растекшуюся по полу воду. В 1982 году фирма "Мицубиси" объявила о создании робота, который был настолько ловок, что мог зажигать сигарету и снимать телефонную трубку. Но самым замечательным был признан созданный в том же году американский робот, который с помощью своих механических пальцев, камеры-глаза и компьютера-мозга менее чем за четыре минуты собирал кубик Рубика. Серийный выпуск роботов второго поколения начался в конце 70-х годов. Особенно важно то, что их можно успешно использовать на сборочных операциях (например, при сборке пылесосов, будильников и других несложных бытовых приборов) - этот вид работ до сих с большим трудом поддавался автоматизации. Адаптивные роботы стали важной составной частью многих гибких (быстро перестраивающихся на выпуски новой продукции) автоматизированных производств. Третье поколение роботов - роботы с искусственным интеллектом - пока еще только проектируется. Их основное назначение - целенаправленное поведение в сложной, плохо организованной среде, притом в таких условиях, когда невозможно предусмотреть все варианты ее изменения. Получив какую-то общую задачу, такой робот должен будет сам разработать программу ее выполнения для каждой конкретной ситуации (напомним, что адаптивный робот может лишь выбирать одну из предложенных программ). В случае, если операция не удалась, робот с искусственным интеллектом сможет проанализировать неудачу, составить новую программу и повторить попытку. Автор: Рыжов К.В.
▪ Ядерный реактор на быстрых нейтронах
Чувства кота, ожидаюшего возвращения хозяина
16.07.2026 Целесообразность приема пробиотиков после курса антибиотиков
16.07.2026 Резкое похудение и возврат веса могут навредить сердцу
15.07.2026
▪ Дельфины контролируют свое сердцебиение ▪ Вред антибиотиков и антисептиков ▪ Новая компьютерная память в 10 тыс. раз быстрее старой ▪ Усилители Yamaha WXA-50 и WXC-50 ▪ Удлинение теломера для продления жизни
▪ раздел сайта Жизнь замечательных физиков. Подборка статей ▪ статья Без царя в голове. Крылатое выражение ▪ статья Блок питания зарубежных телевизоров. Энциклопедия радиоэлектроники и электротехники
Главная страница | Библиотека | Статьи | Карта сайта | Отзывы о сайте
www.diagram.com.ua |


 Смотрите другие статьи раздела
Смотрите другие статьи раздела 