|



ЭНЦИКЛОПЕДИЯ РАДИОЭЛЕКТРОНИКИ И ЭЛЕКТРОТЕХНИКИ Управление движением руки. Энциклопедия радиоэлектроники и электротехники
Энциклопедия радиоэлектроники и электротехники / Радиолюбителю-конструктору Прежде чем приступить к описанию предлагаемой конструкции, следует сделать важное примечание. Разработанный бесконтактный управляющий элемент может быть применен не только в компьютерной технике. Описанное конструктивное оформление и назначение устройства -всего лишь один пример из возможных его применений. Среди любителей истории авиации заслуженной популярностью пользуется компьютерная игра "Ил-2. Забытые сражения" с ее многочисленными дополнениями. Ни один учебник истории так не объяснит спокойного мужества пилота штурмовика, аккуратно и точно, как в лабораторном опыте, ведущего на боевом курсе терзаемую зенитками машину. Или бешенный азарт пилота "Райдена", видящего, как растет в его прицеле силуэт "Бойсана". Однако положение у виртуального пилота не так удобно, как у настоящего. И картинка на мониторе уступает реальности, да и просто не хватает рук работать с клавиатурой. Последняя проблема отчасти решается с помощью джойстика. Вот тут бы еще педали, чтобы управлять рулем поворота. Однако они имеются только в очень редких и дорогих устройствах. Правда, даже в дешевых моделях есть третий регулятор, который можно использовать по желанию: или в качестве педалей, или сектора газа. Вскрыв свой джойстик (рис.1), я обнаружил, что крайние выводы всех его переменных резисторов (потенциометров) соединены параллельно. Очевидно, с них снимается то или иное постоянное напряжение, которое и подается на схему. Это и послужило отправной точкой для разработки. Простейшее решение очевидно - сделать педали, осью которых будет служить переменный резистор. Они могут дополнить моделируемую систему управления каким-либо реальным самолетом. Но, помимо высокой технической и исторической достоверности, такое решение обладает и немалыми недостатками. Конструкция очень громоздка и тяжела. Возникает проблема с ее креплением к полу. В горячий момент боя, или когда требуется на взлете удержать от разворота реактивным моментом мощного мотора такую "зверюгу", как Ла-5ФН, трудно удержаться от того, чтобы не надавить на педаль как следует. Люфты в механических узлах делают управление тяжелым. Не приносит радости и износ переменных резисторов. Словом, требуется какая-то иная конструкция, пусть и не столь историчная, но более удобная и компактная. А почему бы нам "не обставить" все эти мыши, клавиатуры, сенсорные экраны ай-фонов, непременно требующие непосредственного соприкосновения и оторвать процесс управления от поверхности панели, перенести его в объем над ней? Помните, как в одной из повестей Кира Булычева: "Пришелец провел ладонью над зеленым огоньком. Тот погас и вновь загорелся ярче, чем прежде". Мы тоже можем сделать подобное. Первое, что приходит на ум при мысли о бесконтактном управлении - это оптика. Однако большинство оптических систем работает на просвет или на прерывание луча. Вставлять руку в какую-то щель между источником света и приемником? Кому нужно такое "бесконтактное" устройство? Схемы же, работающие на отражение, обычно имеют дело со специальными, контрастно отпечатанными метками и штрих-кодами. При этом надежность их реакции на предмет, который может быть любого цвета и фактуры, тоже сомнительна. Ограничивает свободу выбора конструктора и еще одно обстоятельство - лучшая оптика использует лазеры. Но их излучение вредно для зрения и потому применять их в панелях управления, на которые смотрит человек, нежелательно. Неизбежное в эксплуатации загрязнение и запыление оптики также время от времени создает проблемы. Наконец, если датчиков больше одного, то это приводит к значительному усложнению и удорожанию схемы. Поэтому я решил пойти по пути использования емкостных датчиков. Первые подобные системы использовали колебательные контуры и были очень нестабильны. Практически при каждом включении требовалась их подстройка. Позднее появились более стабильные цифровые конструкции на принципе задержки импульсов. Однако это были обычные сенсорные устройства. Их авторам, по-видимому, не хватило фантазии вообразить устройство, работающее без непосредственного прикосновения. Я решил попытаться... Взгляните на рисунок 1. Генератор на элементах D1.2, D1.1 выдает импульсы на формирователь импульсов по фронту на D 1.3, D 1.4. На его выходе (вывод 11) все время присутствует логическая 1, кроме момента после прихода фронта импульса с выхода генератора (выв. 3). На время задержки импульса в цепочке R4, R3, СА на всех входах D1.4 устанавливаются логическая 1, а на выходе - логический 0. Пока емкость датчика СА, а следовательно, и длительность нулевого импульса невелика, усредненное постоянное напряжение на выходе формирователя, сглаженное R6, С3 практически не отличается от логической единицы. Но стоит емкости датчика увеличиться, как логический 0 на выходе формирователя занимает большую часть периода тактовых импульсов и напряжение на выходе уменьшается. Для получения должной чувствительности устройства необходимо, чтобы длительность импульсов формирователя была сравнима с периодом тактовых импульсов (но не превосходила их). Это достижимо при частотах тактового генератора не ниже 100 кГц.
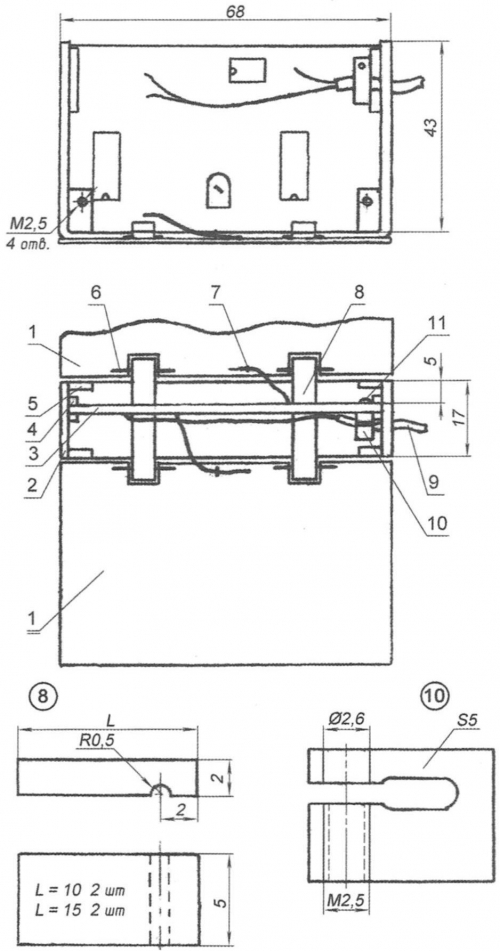
Теперь посмотрим на конструкцию емкостного датчика (рис.2). Он представляет собой расположенную горизонтально пластину фольгированного стеклотекстолита. Второй (земляной) обкладкой служит жестяной кожух-экран, в который помещена вертикально плата устройства. Они образуют несколько необычный, полуоткрытый конденсатор с пластинами, расположенными перпендикулярно друг другу. Он четко реагирует увеличением своей емкости на помещение в его поле любого предмета, как проводящего ток, так и диэлектрического. Предмет чувствуется на расстоянии не менее 30 мм. Такая конструкция дает довольно размашистый сигнал, способный преодолеть различные помехи и нестабильности. А операционный усилитель DA1 может довести его амплитуду до любой требуемой величины. Приблизьте ногу к пластине и руль Вашего самолета повернется. Уберите ногу обратно вверх или назад и процесс пойдет в обратном порядке.
Ёмкостных датчиков, как и педалей в настоящем самолете - два. Поскольку сигнал от одного датчика заведен на инвертирующий вход усилителя, а от другого - на неинвертирующий, то выходное напряжение зависит от их баланса, от того, какую ногу вы "дадите" больше. Схема при этом не очень-то усложнилась, ведь и тактовый генератор, и даже инвертор D1.3 могут быть общими для нескольких каналов. Усиление ОУ на несколько порядков для плавного регулирования явно избыточно. Изменить "передаточное число" управления можно, введя цепь отрицательной обратной связи. R9 снижает усиление, а по переменному току ООС еще более глубока, благодаря конденсатору С 5. Это исключает возможность возникновения автоколебаний. Печатная плата устройства приведена на рисунке 3. На свободных от фольги участках платы в районе подключения емкостных датчиков сверлится множество отверстий диаметром около 3 мм для снижения начальной емкости и увеличения чувствительности устройства. Входы неиспользуемых элементов D2, во избежание их повреждения статическими зарядами, заземлены. Эти проводники желательно сделать тонкими. Тогда, в случае необходимости (выход из строя рабочих элементов или какие-то доработки) вы сможете их перерезать и использовать эти элементы.
Конструкция. Пластины емкостных датчиков расположены фольгой вверх. Они укреплены шарнирно, могут быть подняты и прижаты к стенкам корпуса, образуя компактную коробочку, удобную для переноски и хранения. В районе вырезов для этого припаиваются оси из обрезков медной проволоки диаметром 0,8 мм. Также к пластинам припаиваются гибкие провода к схеме (лучше всего МГТФ) и проволочные колечки, удерживающие незачищенную их часть и предотвращающие переламывание провода в месте зачистки. После выполнения всех паек рабочую поверхность датчика необходимо изолировать от электрического контакта с посторонними предметами. Во многих случаях для этого достаточно наклейки широкого скотча. Корпусом устройства служит П-образная обойма из пластмассы толщиной 2 мм. Из обрезков пластмассы вырезаются и приклеиваются изнутри направляющие для платы и бобышки, в которых делаются резьбовые отверстия для крепления кожуха-экрана. В пропилы нижних лапок корпуса вкладываются осями пластины датчиков и заклеиваются накладками, также фиксирующими нижнюю часть платы. П-образный кожух-экран изготавливается из жести. Для уменьшения начальной емкости и влияния опорной поверхности он не доходит несколько миллиметров до низа корпуса. Напротив подстроечного резистора R4 в экране делается отверстие. Изнутри к экрану припаивается гибкий провод для соединения с общим проводом платы.
Налаживание. Установите R4 в среднее положение. Вместо RЗ впаяйте на коротких проводах подстроенный резистор сопротивлением около 1 МОм. Установите его на минимальное значение. Проследите, чтобы подстроечник, его провода и любые другие предметы не попадали в поле датчика СА. Плавно увеличивайте его сопротивление до тех пор, пока постоянное напряжение на выводе 11 DD1 не снизится на 20 - 25 %. Это сигнал о том, что устройство начало чувствовать окружающее пространство. Измерьте сопротивление подстроечника и замените его таким же постоянным резистором, а подстроечник перенесите на место R5 так, чтобы он не попал в поле датчика СБ. Установите на выходе второго формирователя такое же напряжение, как и на выходе первого. Окончательный баланс установите резистором R4 с помощью тонкой диэлектрической отвертки после полной сборки устройства. Вытащите отвертку и проконтролируйте напряжение на выходе ОУ - оно должно быть близким к половине напряжения питания. Устройство было успешно испытано с программами "Ил-2" и имитатором планера "Кондор". Степень реализма оказалась весьма близка к настоящему летательному аппарату. Впрочем, упомянутые программы созданы не для бескрылых людей. Смотрите на шарик "Пионера" и, после небольшой тренировки, все будет отлично. Как уже было сказано, предлагаемый бесконтактный управляющий элемент может быть применен не только в компьютерной технике. В большинстве случаев нет нужды в двухканальной балансной схеме, подобной описанной. Одноканальный элемент может быть сделан, как показано на рисунке 5.
Поскольку выход формирователя подключен к инвертирующему входу ОУ, то в исходном состоянии напряжение на выходе устройства мало. Напряжение на неинвертирующем входе устанавливается подстроечником R10 чуть ниже порога переключения. Если поднести руку к емкостному датчику, то напряжение на выходе устройства станет повышаться. Его можно использовать для регулирования или просто включения-выключения каких либо аппаратов. В последнем случае цепь ООС не требуется. В ходе экспериментов с устройством этот вариант показал себя вполне работоспособным. Встраивая бесконтактное управление в какую либо аппаратуру следует помнить, что датчик реагирует на емкость, вносимую предметами не только спереди, но и сзади него, то есть в корпусе аппаратуры. Важно, чтобы эта паразитная емкость была поменьше, а главное - неизменной. Нежесткое крепление датчика или свободно болтающиеся рядом с ним провода могут сбивать настройку. Это не позволит реализовать хорошую чувствительность. Интересно применение бесконтактного управления (два независимых канала) для движения каких-либо дверей, створок и т.п. Установив два датчика на ручке, как показано на рисунке 6, можно "толкнуть" створку в любое требуемое положение, не прикасаясь к ней.
Конечно, классические тумблеры и регуляторы проще и дешевле. Но все же найдутся области применения, где предлагаемые бесконтактные управляющие элементы будут более предпочтительны. Например, в опасных условиях работы, когда необходимо совершенно исключить электрический контакт с оборудованием, передачу инфекции и т. д. Таким образом, многие устройства в будущем смогут управляться буквально одним взмахом руки, не вооруженной пультами, жетонами или какими-то иными приспособлениями. Автор: А.Лисов
Чувства кота, ожидаюшего возвращения хозяина
16.07.2026 Целесообразность приема пробиотиков после курса антибиотиков
16.07.2026 Резкое похудение и возврат веса могут навредить сердцу
15.07.2026
▪ Серийный электрический SUV Smart #1 ▪ Наушники предупредят о потере сознания ▪ Производство шелка с помощью искусственной железы паука ▪ Борьба с жарой с помощью холодных крыш
▪ раздел сайта Электрику. ПТЭ. Подборка статей ▪ статья Танк. История изобретения и производства ▪ статья Как устроен человеческий глаз и отчего мы различаем цвета? Подробный ответ ▪ статья Подрезка крон деревьев, растущих вдоль линий связи. Типовая инструкция по охране труда ▪ статья Усилитель на микросхеме TDA2004, 2х10 ватт. Энциклопедия радиоэлектроники и электротехники ▪ статья Говорящая монета. Секрет фокуса
Главная страница | Библиотека | Статьи | Карта сайта | Отзывы о сайте
www.diagram.com.ua |

 Оставьте свой комментарий к этой статье:
Оставьте свой комментарий к этой статье: