|



МОДЕЛИРОВАНИЕ
Робот Орион. Советы моделисту
Справочник / Аппаратура радиоуправления Возможно, в недалеком будущем, когда новые космические корабли отправятся на Луну, Венеру или Марс, в арсенале космонавтов будут роботы, которые первыми выйдут на поверхность планеты, чтобы провести научные исследования, выполнить несложные сварочно-монтажные работы. Так решили ребята из кружка космического моделирования Сумской городской станции юных техников и построили подобный робот своими руками. "Орион" (так назвали свое детище его создатели) может выполнять ряд действий, присущих живому организму. В темноте он "спит", по при включенном освещении "пробуждается" и направляется прямо па свет. Робот может передвигаться вперед, назад, вправо и влево. Как человек, он берет и переносит различные предметы, разговаривает, поворачивая голову к собеседникам. Кибер одновременно исследователь и сварщик по профессии. Сигналы, поступающие с локатора и датчика радиоактивной опасности, обрабатывает миниатюрная ЭВМ. Собранную информацию отображает вмонтированное в туловище видеоустройство. Сварку робот выполняет следующим образом. Рукой-манипулятором берет специальный электрод, на конце которого находится термитная спичка с электрозапалом. Высокая температура термитной спички (1500°) позволяет разрезать металлическую пластину до 3 мм толщины.
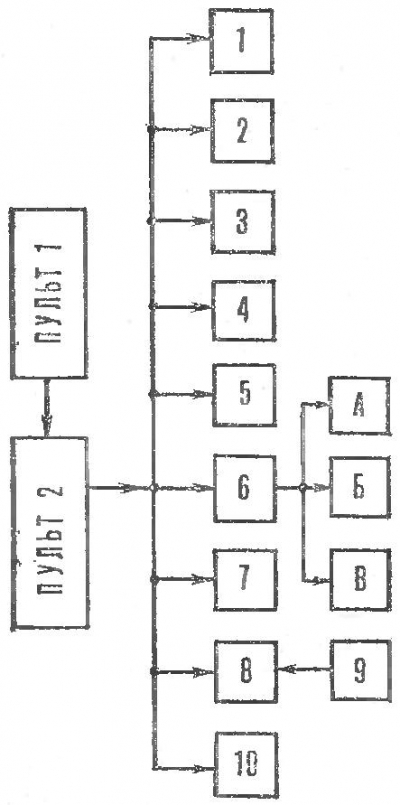
На финале X Всесоюзного конкурса "Космос" робот "Орион" занял первое место по разделу "Популяризация космоса". СТРУКТУРНАЯ СХЕМА. Управляют роботом с помощью дистанционного пульта, на котором расположен ряд тумблеров, но некоторые операции выполняются автоматически (рис. 2).
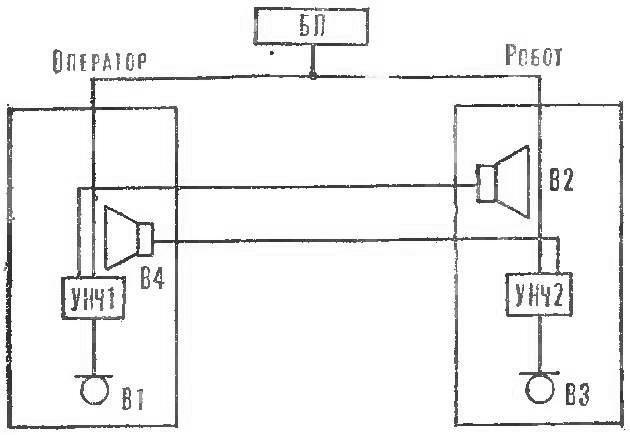
Включают тумблер "Питание" - пульт готов к работе. Теперь, манипулируя отдельными выключателями, дают роботу указания. Тумблером "Локатор" включают электродвигатель вращения антенны, а щелчка выключателя с биркой "ЭВМ" достаточно, чтобы кибер начал "думать": срабатывает электродвигатель прерывателя, имитирующего работу "компьютера", и поочередно зажигающиеся лампочки, расположенные спереди робота, отображают его "мыслительную деятельность". Движение робота осуществляется с помощью двух реверсивных электродвигателей. Для их управления служат два двухполюсных переключателя, от положения контактов которых зависят направления вращения моторов. Механическая "рука"-манипулятор снабжена тремя электродвигателями, команды на которые поступают тоже с пульта управления. Манипулятор может поворачиваться вокруг оси на 270° в "плечевом суставе" и на 90° в "локтевом". Механизм захвата соединен с двигателем, вращение которого дает возможность сжимать и разжимать "пальцы" манипулятора. "Голову" вращает реверсивный электродвигатель с конечными выключателями, ограничивая ее поворот на 180°. Ориентация на свет происходит автоматически с помощью двух фотореле, включающих электродвигатели "ног", ориентируя робота на источник свете. А если к трубке Гейгера блока радиоактивной опасности поднести пластину с налетом белого фосфора, электронный сигнализатор немедленно включает сигнальную красную лампу и сирену. Для тоге чтобы кибер мог говорить и отвечать на вопросы, в нем установлены два УНЧ с независимой двусторонней связью. Разумеется, собеседником зрителей является не робот, а спрятанный от "посторонних глаз" оператор (ом может находиться, к примеру, в соседней комнате), который слушает и передает информацию через робота. Прохождение сигналов двусторонней связи показано на блок-схеме (рис. 3).
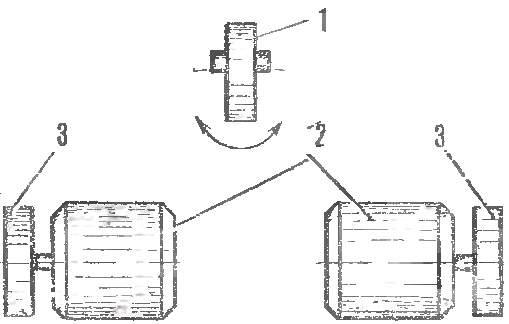
КОРПУС робота "Орион" изготовлен из стеклоткани и эпоксидного клея ЭПД-5. Сначала из пенопласта вырезают формы отдельно для туловища, ног и рук. Затем из этих деталей собирают подобие будущего робота и покрывают гонким слоем пластилина (чтобы пенопласт не приклеился к стеклоткани). На форму робота в зависимости от толщины материала накладывают 2-4 слоя стеклоткани, пропитывают ее эпоксидным клеем, а затем застывшую оболочку обрабатывают напильником, покрывают слоем нитрошпаклевки и после шлифовки красят 2-3 раза нитрокраской. После обработки корпуса шлифовальной пастой приступают к сборке конструкции. Голова робота изготовлена из жести толщиной 0,3 мм. Б нишах "ног", "туловища", "головы" и "рук" установлены 9 электродвигателей (рис. 4) и монтажные платы электронных блоков. Двигатели привода "ног" РД-09 с редукцией 1/137 имеют независимое друг от друга управление, что дает возможность роботу поворачиваться в любую сторону.
Заднее колесо "ног" самоцентрирующееся (рис. 5).
Двигатель РД-09 с редукцией 1/740 поворачивает "руку" в "плече" (рис. 6), ДСДР на 2 об/мин - в "локте" и МУ-10 с редукцией 1/80 приводит в действие "кисть". Все электродвигатели использованы от устаревших приборов автоматики.
Механизм захвата "руки" основах на возвратно-поступательном движении гайки, связанной с тремя "пальцами" (рис. 7). Они изготовлены из дюралюминия Д16Т толщиной 5 мм. А чтобы устройство при захвате различных предметов не заклинивало, на фланце установлена упорная пружина.
"Голова" насажена непосредственно на вал двигателя ДСДР, имеющего 2 об/мин. Для ограничения хода двигателей установлены микровыключатели МП-1. Антенна локатора вращается только в одну сторону. Она также установлена на вал двигателя ДСДР. ЭЛЕКТРИЧЕСКАЯ СХЕМА УНЧ СИСТЕМЫ СВЯЗИ представляет собой трехкаскадный усилитель с двухтактным оконечным каскадом на транзисторах V3 и V4 (рис. 8). На транзисторе V2 собран фазоинверторный каскад. Связь фазоинверторного каскада с оконечным происходит через согласующий трансформатор Т1.
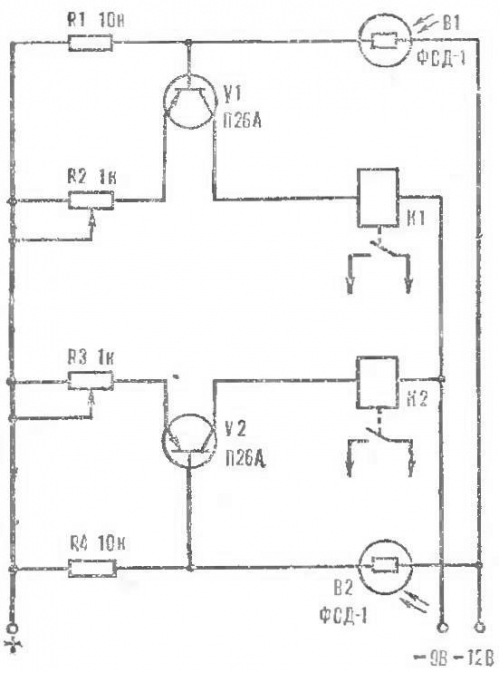
Предварительный усилитель - обычный резистивный каскад на транзисторе V1. Регулируемая частотно-зависимая обратная связь (R8С5) позволяет установить заданный коэффициент усиления всего усилителя при разбросе параметров элементов схемы. Принципиальная схема Для температурной стабилизации режима выходного каскада терморезистор R7 ММТ-1 включен в базу инверторного каскада. В схеме предусмотрены дополнительные меры по улучшению режимной стабилизации каскадов с помощью диодов V5 и V6. БЛОК "РАДИАЦИЯ" состоит из двух частей - электронной и исполнительной. Назначение его - обнаруживать опасную дозу радиации для космонавтов и оповещать о ней. Чувствительный элемент устройства - газоразрядный датчик (счетчик) СТС-5. Действие его основано на ионизации газа под действием ядерного излучения. При достаточно высокой напряженности поля в счетчике происходит лавинообразный разряд, усиливающий во много раз ионизационный эффект. Высокое напряжение для питания счетчика вырабатывает блокинг-генератор, собранный ка транзисторе V1 (рис. 9). Трансформатор Т1 намотан на сердечнике из пластин Ш12, толщина пакета 12 мм; первичная обмотка содержит 146 витков с отводом от 26 витка провода ПЭЛ 0,2, вторичная обмотка - 3000 витков ПЭЛ 0,08. Импульсы блокинг-генератора, выпрямленные диодами V2-V4, заряжают конденсатор С3 до напряжения 300-500 В. Как только счетчик попадает в зону радиации, возникает разряд. Импульсы напряжения с резистора R2 через конденсатор С4 поступают на двухкаскадный усилитель, собранный на транзисторах V5, V6. С коллекторной нагрузки второго каскада положительные импульсы напряжения поступают через конденсатор С6 на выпрямитель, выполненный по схеме удвоения напряжения на диодах V7, V8. Этот выпрямитель заряжает конденсатор С8. Напряжение, выделяющееся на резисторе R10 при разряде С8, складывается с опорным напряжением на конденсаторе С7, величину которого устанавливают потенциометром R10. Суммарное напряжение приложено к базе транзистора V9, входящего в состав спускового устройства V9, V10. Вот как оно действует. Когда радиации нет, потенциал на базе зависит только от положения движка R10. Его устанавливают таким образом, чтобы через V9 протекал ток величиной 4-5 мА. При этом транзистор V10 закрыт и тока в обмотке реле К1 нет. Радиация вызывает появление напряжения на конденсаторе С8, которое, складываясь с опорным напряжением, вызывает уменьшение тока через транзистор V9. При некотором предельно допустимом уровне радиации полупроводниковый триод V10 открывается, вызывая срабатывание репе К1, контактные пластины которого включают красную лампу и звуковой сигнал. БЛОК "ОРИЕНТАЦИЯ НА СВЕТ" заставляет робот двигаться точно на свет. Воспринимающими элементами являются два фоторезистора В1 и B2 (рис. 11). Когда они не освещены, транзисторы V1 и V2 закрыты и реле К1 и К2 (РЭС-15, паспорт PC4.591.004) обесточены. При освещении фоторезисторов ток через полупроводниковые триоды возрастает, вызывая срабатывание репе К1 и К2. Их контакты включают каждый свой электродвигатель привода "ног", и робот начинает двигаться вперед. Если луч попадает только на один фоторезистор, робот будет поворачиваваться - "искать" источник света.
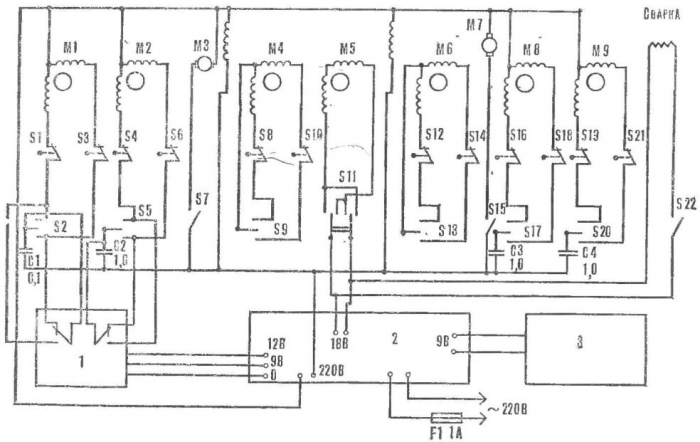
Резисторы R1 и R4 служат для установки начального тока транзисторов, с помощью переменных резисторов R2 и RЗ регулируется чувствительность автоматического устройства. Согласующий и выходной трансформаторы УНЧ связи применены от магнитофона "Весна-3". У силового трансформатора ТС-160 от телевизоров УНТ-47/59, используемого в блоке питания, вторичные обмотки переделаны на напряжения 220, 18, 12, 9, 6 В и содержат соответственно 824 витка ПЭВ 0,4; 62, 41, 31 виток ПЭВ 1,3 и 21 виток ПЭВ 1,7 (рис. 10). Оба пульта связаны с роботом проводом МГТФ 0,12 через разъемы ШР-24. Схема соединения электродвигателей и блоков робота показана на рисунке 12.
После того как конструкция собрана, поверхность робота покрывают цапонлаком, в котором размешан алюминиевый порошок в соотношении 20:1, применяемый для окраски под серебро. Корпус кибера приобретает мягкий стальной цвет с зеленоватым оттенком, Автор: В.Воробей
▪ Скоростная кордовая гоночная модель
Чувства кота, ожидаюшего возвращения хозяина
16.07.2026 Целесообразность приема пробиотиков после курса антибиотиков
16.07.2026 Резкое похудение и возврат веса могут навредить сердцу
15.07.2026
▪ Карты памяти SDHC/SDXC UHS-I Speed Class 3 (U3) от Kingston ▪ Решена основная проблема выращивания растений в космосе ▪ Простой датчик парниковых газов ▪ Туристическая подводная лодка Triton 660/9 AVA
▪ раздел сайта Светодиоды. Подборка статей ▪ статья Марк Туллий Цицерон. Знаменитые афоризмы ▪ статья Какое животное самое тяжелое? Подробный ответ ▪ статья Маятниковая пила. Домашняя мастерская ▪ статья Микросхемы управления балластами. Энциклопедия радиоэлектроники и электротехники ▪ статья Желаемое и действительное. Секрет фокуса
Главная страница | Библиотека | Статьи | Карта сайта | Отзывы о сайте
www.diagram.com.ua |








 Смотрите другие статьи раздела
Смотрите другие статьи раздела 