|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ЭНЦИКЛОПЕДИЯ РАДИОЭЛЕКТРОНИКИ И ЭЛЕКТРОТЕХНИКИ Электрические микродвигатели. Энциклопедия радиоэлектроники и электротехники
Энциклопедия радиоэлектроники и электротехники / Электродвигатели Обычно электрические двигатели делят на три группы: большой, средней и малой мощностей. Для двигателей малой мощности (будем называть их микродвигателями) верхнюю границу мощности не устанавливают, обычно это несколько сот ватт. Микродвигатели широко используют в приборах и аппаратах бытового назначения (сейчас в каждой семье имеется несколько микродвигателей - в холодильниках, пылесосах, магнитофонах, проигрывателях и пр.), измерительной технике, системах автоматического регулирования, авиации и космической технике и других областях человеческой деятельности. Первые электродвигатели постоянного тока появились еще в 30-е годы ХIX столетия. Большой шаг в развитии электродвигателей был сделан в результате изобретения в 1856 г. немецким инженером Сименсом двухякорного преобразователя и открытия им в 1866 г. динамоэлектрического принципа. В 1883 г. Тесла, а в 1885 г. Феррари независимо друг от друга изобрели асинхронный двигатель переменного тока. В 1884 г. Сименс создал коллекторный двигатель переменного тока с последовательной обмоткой возбуждения. В 1887 г. Хазельвандер и Доливо-Добровольский предложили конструкцию ротора с короткозамкнутой обмоткой типа "беличья клетка", что существенно упростило конструкцию двигателя. В 1890 г. Хитин и Лебланк впервые использовали фазосдвигающий конденсатор. В бытовых электроприборах электродвигатели начали использовать с 1887 г. - в вентиляторах, с 1889 г. - в швейных машинах, с 1895 г. - в бормашинах, с 1901 г. - в пылесосах. Однако к настоящему времени потребность в микродвигателях оказалась настолько большой (в современной видеокамере используется до шести микродвигателей), что возникли специализированные фирмы и предприятия по их разработке и производству. Разработано большое количество типов микродвигателей, каждому из которых посвящена статья из данной серии. Асинхронные микродвигатели Однофазные асинхронные микродвигатели являются наиболее распространенным типом, они удовлетворяют требованиям большинства электроприводов приборов и аппаратов, отличаясь низкой стоимостью и уровнем шума, высокой надежностью, не требуют ухода и не содержат подвижных контактов. Включение. Асинхронный микродвигатель может быть с одной, двумя или тремя обмотками. В однообмоточном двигателе нет начального пускового момента, и для его запуска нужно использовать, например, пусковой двигатель. В двухобмоточном двигателе одна из обмоток, называемая главной, непосредственно подключается к питающей сети (рис.1).
Для создания пускового момента в другой, вспомогательной, обмотке должен протекать ток, сдвинутый по фазе относительно тока в главной обмотке. Для этого последовательно со вспомогательной обмоткой включают дополнительный резистор, который может иметь активный, индуктивный или емкостной характер. Наиболее часто в цепь питания вспомогательной обмотки включают конденсатор, получая при этом оптимальный угол сдвига фаз токов в обмотках, равный 90° (рис.1,б). Конденсатор, постоянно включенный в цепь питания вспомогательной обмотки, называется рабочим. Если при запуске двигателя необходимо обеспечить повышенный пусковой момент, то параллельно рабочему конденсатору Св на время пуска включают пусковой конденсатор Са (рис.1,в). После разгона двигателя до частоты вращения пусковой конденсатор отключается с помощью реле или центробежного выключателя. На практике чаще используют вариант рис.1,б. Эффект сдвига фаз можно получить путем искусственного увеличения активного сопротивления вспомогательной обмотки. Это достигается либо включением дополнительного резистора, либо изготовлением вспомогательной обмотки из высокоомного провода. Из-за повышенного нагрева вспомогательной обмотки последнюю после запуска двигателя отключают. Такие двигатели дешевле и надежнее конденсаторных, хотя и не позволяют обеспечить фазовый сдвиг токов обмоток в 90°. Для реверса направления вращения вала двигателя в цепь питания вспомогательной обмотки следует включить катушку индуктивности или дроссель, вследствие чего ток в главной обмотке будет опережать по фазе ток во вспомогательной обмотке. На практике этот способ применяется редко, так как сдвиг фаз получается незначительным из-за индуктивного характера сопротивления вспомогательной обмотки. Чаще всего используют способ фазового сдвига между основной и вспомогательной обмотками, заключающийся в замыкании вспомогательной обмотки. Главная обмотка имеет магнитную связь со вспомогательной, благодаря чему при подключении главной обмотки к питающей сети во вспомогательной наводится ЭДС и возникает ток, отстающий по фазе от тока главной обмотки. Ротор двигателя начинает вращаться в направлении от главной к вспомогательной обмотке. Трехобмоточный трехфазный асинхронный двигатель можно использовать в режиме однофазного питания. На рис.2 показано включение трехобмоточного двигателя по схемам "звезда" и "треугольник" в однофазный режим работы (схемы Штейнмеца). Две из трех обмоток непосредственно включены в питающую сеть, а третья подключена к напряжению питания через пусковой конденсатор. Для создания необходимого пускового момента последовательно с конденсатором необходимо включать резистор, сопротивление которого зависит от параметров обмоток двигателя.
Обмотки. В отличие от трехобмоточных асинхронных двигателей, для которых характерны симметричное пространственное расположение и одинаковые параметры обмоток на статоре, в двигателях с однофазным питанием главная и вспомогательная обмотки имеют различные параметры. Для симметричных обмоток количество пазов на полюс и фазу можно определить из выражения: q = N / 2pm, где N - количество пазов статора; m - количество обмоток (фаз); р - количество полюсов. В квазисимметричных обмотках количество пазов и ширина обмоток отличаются незначительно, тогда как активное и индуктивное сопротивления главной и вспомогательной обмоток имеют разные значения. В несимметричных обмотках количество пазов, занимаемых каждой обмоткой изменяется существенно. Поэтому главная и вспомогательная обмотки имеют различное количество витков. Характерным примером является 2/3-1/3 обмотка (рис.3), в которой 2/3 пазов статора занимает главная, а 1/3 - вспомогательная обмотка.
Конструкция. На рис.4 показано сечение двигателя с двумя сосредоточенными или катушечными обмотками, расположенными на полюсах статора.
Каждая обмотка (главная 1 и вспомогательная 2) образована двумя катушками, расположенными на противоположных полюсах. Катушки надевают на полюса и вставляют в ярмо машины, имеющее в данном случае квадратную форму. Со стороны рабочего воздушного зазора катушки удерживаются специальными выступами, выполняющими функцию полюсных башмаков 3. Благодаря им кривая распределения индукции магнитного поля в рабочем воздушном зазоре приближается к синусоиде. Без этих выступов форма указанной кривой близка к прямоугольной. В качестве фазосдвигающего элемента для такого двигателя можно использовать как конденсатор, так и резистор. Можно также закорачивать вспомогательную обмотку. В этом случае двигатель преобразуется в асинхронную машину с расщепленными полюсами. Двигатели с расщепленными полюсами используются чаще всего, благодаря своей конструктивной простоте, высокой надежности и низкой стоимости. Такой двигатель также имеет на статоре две обмотки (рис.5).
Главная обмотка 3 изготовлена в виде катушки и включена непосредственно в питающую сеть. Вспомогательная обмотка 1 закорчена накоротко и содержит от одного до трех витков на полюс. Она охватывает часть полюса, чем и объясняется название двигателя. Вспомогательная обмотка изготовлена из медного провода круглой или плоской формы сечением в несколько квадратных миллиметров, который изгибается в витки соответствующей формы. Затем концы обмотки соединяют посредством сварки. Ротор двигателя выполнен короткозамкнутым, причем на его торцах крепят ребра охлаждения, которые улучшают отвод тепла и от обмоток статора. Варианты конструктивного исполнения двигателей с расщепленными полюсами показаны на рис.6 и 7.
В принципе главная обмотка может располагаться симметрично или асимметрично относительно ротора. На рис.6 изображена конструкция двигателя с асимметричной главной обмоткой 5 (1 - крепежное отверстие; 2 - магнитный шунт; 3 - короткозамкнутая обмотка; 4 - отверстия крепления и юстировки; 6 - каркас обмотки; 7 - ярмо). Такой двигатель имеет значительное рассеяние магнитного потока во внешней магнитной цепи, поэтому его КПД не превышает 10-15%, и его изготавливают на мощность не более 5-10 Вт. С точки зрения технологичности двигатель с симметрично расположенной главной обмоткой является более сложным. В двигателях мощностью 10-50 Вт используют составной статор (рис.7, где: 1 - кольцо ярма; 2 - короткозамкнутое кольцо; 3 - полюс; 4 - ротор с обмоткой "беличья клетка"; 5 - магнитный шунт). Ввиду того что полюсы двигателя охвачены ярмом и обмотки расположены внутри магнитной системы, магнитные потоки рассеяния здесь значительно меньше, чем в конструкции на рис.6. КПД двигателя 15-25%. Для изменения частоты вращения двигателя с расщепленными полюсами используют схему с перекрестными полюсами (рис.8). В ней достаточно просто реализуется переключение числа пар полюсов обмотки статора, для изменения которых достаточно согласно включенные обмотки включить встречно. В двигателях с расщепленными полюсами используется также принцип регулирования частоты вращения, заключающийся в переключении катушек обмотки с последовательного соединения на параллельное.
Синхронные микродвигатели Синхронные двигатели с однофазным питанием применяют в часах, счетчиках, реле времени, системах регулирования и управления, измерительных приборах, звукозаписывающей аппаратуре и т.д. В синхронном двигателе создается вращающееся магнитное поле, частота вращения которого постоянна и не зависит от изменения нагрузки. Как и в асинхронном двигателе с однофазным питанием, в синхронном двигателе создается эллиптическое вращающееся магнитное поле. При перегрузке синхронные микродвигатели выпадают из синхронизма. После подачи на них напряжения питания необходимо создать условия, при которых двигатель разгонится и втянется в синхронизм. Различают реактивные, гистерезисные синхронные двигатели, а также двигатели с возбуждением от постоянных магнитов. Реактивные двигатели При мощности до 100 Вт синхронный двигатель изготовляют с двумя обмотками - главной и вспомогательной, последовательно с последней включают фазосдвигающий конденсатор. Статор синхронного реактивного двигателя конструктивно не отличается от статора асинхронного двигателя. На роторе синхронного двигателя расположена короткозамкнутая обмотка ("беличья клетка"), обеспечивающая надежный запуск синхронного микродвигателя. До частоты вращения, близкой к синхронной, двигатель разгоняется как асинхронный, а затем самостоятельно втягивается в синхронизм, а ротор продолжает вращаться с синхронной частотой вращения. Конструкция ротора синхронного двигателя показана на рис.9.
По его окружности с равномерным шагом расположены пазы (рис.9,а), причем глубина пазов в 10-20 раз превышает длину рабочего воздушного зазора. В эти пазы заливают алюминий, и образованные таким образом стержни обмотки ротора замыкаются накоротко с помощью колец из алюминия, привариваемых с двух сторон к концам стержней. При одном и том же значении потребляемой из сети реактивной мощности полезный момент на валу синхронного двигателя в два раза меньше момента на валу асинхронного двигателя. КПД и cosf синхронного двигателя также хуже, чем у асинхронного. Это объясняется тем, что рабочий воздушный зазор у синхронного двигателя больше, чем у асинхронного. Изменяя проводимость отдельных участков магнитной цепи двигателя, можно направить магнитный поток в нужном направлении. Этого можно добиться с помощью специальных полостей в магнитно-мягком материале, заливаемых алюминиевым сплавом. На рис.9,б показан двухполюсный ротор, изготовленный подобным способом. В этом случае длина рабочего воздушного зазора, как и у асинхронного двигателя, сохраняется неизменной по всей окружности статора. Мощность такого синхронного двигателя близка к мощности асинхронного с однофазным питанием. Гистерезисные двигатели В конструктивном отношении статор гистерезисного двигателя не отличается от статоров ранее рассмотренных двигателей (асинхронного, реактивного синхронного). При низкой частоте вращения гистерезисного двигателя его статор изготовляют с когтеобразными полюсами (рис.10).
Он содержит ярмо 1 с обмоткой, причем ее катушки чередуются вдоль окружности статора, образуя при этом последовательность электромагнитов с чередующейся полярностью (N-S-N-S...); 2 - когтеобразные полюсы; 3 - втулку из синтетического материала; 4 - поток рассеяния, 5 - полезный магнитный поток; 6 - ротор; 7 - кольцевую обмотку; 8 - каркас обмотки. С боковых сторон катушек установлены пластины для замыкания магнитного потока. При подключении обмотки статора к питающей сети в рабочем воздушном зазоре создается многополюсное магнитное поле. На рис.11 показаны четыре расположенных друг за другом полюса (1 - главный северный; 2 - вспомогательный северный; 3 - короткозамкнутое кольцо; 4 - кольцевая обмотка возбуждения; 5 - главный южный полюс; 6 - вспомогательный южный полюс). Короткозамкнутые кольца (или обмотки), расположенные концентрично относительно катушки обмотки статора, имеют различные коэффициенты связи с главными и вспомогательными полюсами. Таким образом, обеспечивается фазовый сдвиг магнитных потоков указанных полюсов, следствием которого является появление эллиптического вращающегося магнитного поля.
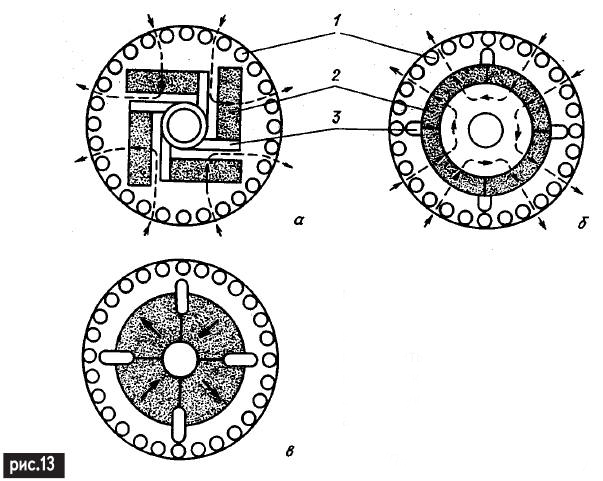
На роторе установлено кольцо из ферромагнитного материала с широкой петлей гистерезиса. Коэрцитивная сила этого материала должна быть меньше, чем у магнитно-твердых материалов, используемых для изготовления постоянных магнитов. В противном случае для перемагничивания кольца потребуется мощное магнитное поле. На кольце ротора имеются окна, количество которых соответствует количеству полюсов статора, благодаря чему обеспечивается синхронное вращение ротора за счет реактивного момента. Двигатели с возбуждением от постоянных магнитов Синхронный двигатель, содержащий ротор из постоянных магнитов, конструктивно похож на двигатель с когтеобразными полюсами (см.рис.10). Основное преимущество двигателя с постоянными магнитами перед гистерезисными состоит в том, что развиваемый им момент при тех же габаритах в 20-30 раз больше момента гистерезисного двигателя. К тому же двигатели с постоянными магнитами являются более надежными. Для запуска двигателя нужно привести его ротор в движение, поэтому нагрузка не должна присоединяться к валу с помощью жесткой связи. Двигатели небольшой мощности содержат ротор с кольцом из ферритового постоянного магнита, которое при небольшом количестве полюсов намагничивается в радиальном направлении. При большом количестве полюсов ротор намагничивается в аксиальном направлении и имеет когтеобразные полюса (рис.12), где 1 кольцо из постоянного магнита; 2 - втулка. Используемая конструкция статора в двигателях большой мощности практически не отличается от конструкции статора асинхронного двигателя с распределенной обмоткой. Конструкции ротора при этом весьма разнообразны.
На рис.13 изображены три варианта конструктивного исполнения четырехполюсных синхронных двигателей с возбуждением от постоянных магнитов. На рис.13,а для двигателей используется феррит бария, на рис.13,б - сплав на основе соединения редкоземельных элементов и кобальта, на рис13,в - сплав альнико (1 - обмотка типа "беличья клетка"; 2 - постоянные магниты; 3 - магнитные шунты).
Для обеспечения асинхронного пуска все роторы имеют короткозамкнутую стержневую обмотку, как и в асинхронном двигателе. Универсальные двигатели Коллекторные двигатели с последовательным возбуждением называют универсальными, поскольку они могут работать как от сети постоянного, так и от сети переменного тока. Они образуют важнейшую группу микромашин. Частота вращения двигателя не зависит от частоты напряжения питания, вследствие чего эти двигатели в отличие от асинхронных могут иметь частоту вращения более 3000 об/мин. Преимуществом универсальных двигателей является простота регулирования частоты вращения путем переключения отпаек последовательной обмотки возбуждения или фазовым регулированием с помощью симисторов. В качестве недостатка можно отметить более высокую стоимость универсального двигателя по сравнению с асинхронным, обусловленную наличием обмотки на роторе и щеточно-коллекторного узла (который к тому же создает дополнительный шум и быстро изнашивается). Конструкция. Универсальные двигатели имеют двухполюсное исполнение. Для уменьшения потерь от вихревых токов магнитопроводы статора и ротора выполняются шихтованными.
На рис.14 показаны несколько вариантов конструктивного исполнения статора двигателя: рис.14,а - статор с машинным изготовлением обмотки; рис.14,б - статор с обмоткой возбуждения, изготовленной и уложенной вручную; рис.14,в - статор с двумя вынесенными обмотками возбуждения; рис.14,г - статор с одной вынесенной обмоткой возбуждения. Обмотка статора (возбуждения) универсального двигателя состоит обычно из двух секций или катушек, между которыми расположен якорь, обмотка которого включена последовательно с обмоткой возбуждения. Наматывать обмотки якоря можно двойным проводом. При прямоугольной форме пазов ротора катушки располагают параллельно друг другу. Обмотка якоря состоит из двух параллельных ветвей, по которым распределяется ток двигателя, проходящий через щетки. Особое внимание в универсальном двигателе следует уделить щеточноколлекторному узлу.
Наиболее часто используются конструкции щеткодержателей, показанные на рис.15,а,б, конструкции рис.15,в,г более дешевые и применяются в менее мощных двигателях, на рис.15,д показана щетка с предохранителями (1 - крышка; 2 вывод; 3 - держатель; 4 - щетка; 5 коллектор; 6 - дроссель фильтра; 7 ось вращения; 8 - кольцо; 9 - крючок; 10 - ламель из меди; 11 - паз; 12 - изолятор; 13 - вывод; 14 -пружина; 15 ниппель из диэлектрика). В теле щетки имеется цилиндрическая полость. Конструкция щетки (рис.15,д) такова, что при срабатывании щетки до конца полости ниппель упирается в поверхность коллектора. Поскольку ниппель сделан из изоляционного материала, контакт щетки с коллектором нарушается, и дальнейшая работа двигателя становится невозможной. Особенности работы на постоянном токе. При работе двигателя от сети постоянного тока падение напряжения на обмотках якоря и возбуждения зависит только от их активного сопротивления, следовательно, при прочих равных условиях напряжение, ток, магнитный поток, ЭДС в обмотке якоря имеют большее значение, чем при питании от сети переменного тока. Это приводит к изменению частоты вращения двигателя. Если при питании от сетей постоянного и переменного тока нужно, чтобы двигатель работал при одной и той же частоте вращения, то в двигателе нужно для режима постоянного тока иметь большее число витков в обмотке возбуждения. Регулирование частоты вращения. Если в обмотке возбуждения сделать дополнительные выводы, то их переключением можно менять частоту вращения (рис.16,а). При уменьшении числа витков частота вращения увеличивается. Вторым способом является установка переменного резистора последовательно с обмотками двигателя (рис.16,б). При увеличении сопротивления резистора частота вращения двигателя уменьшается. Третий способ - использование регулировочного трансформатора (рис.16,в). Повышение напряжения питания приводит к увеличению частоты вращения двигателя. Четвертый способ - шунтирование переменным резистором обмотки якоря (рис.16,г). При уменьшении сопротивления резистора уменьшается и число оборотов. Этот способ хорош тем, что при сбросе нагрузки двигатель не идет вразнос.
Точную регулировку частоты вращения можно получить в электронной симисторной схеме (рис.17). Симистор осуществляет "отсечку" части полупериода переменного напряжения. Для реверса двигателя необходимо изменить полярность подключения обмотки якоря или обмотки возбуждения.
Стабилизация частоты вращения. Универсальные двигатели имеют очень мягкую механическую характеристику, т.е. сильную зависимость частоты вращения от момента нагрузки. Для стабилизации частоты вращения при переменной нагрузке используют, в частности, механические регуляторы. Например, можно использовать центробежный выключатель, контакт которого включен параллельно добавочному резистору. Этот способ обеспечивает стабильность частоты вращения в пределах 1%, но только для того значения частоты вращения, на которое рассчитан цетробежный выключатель. Поэтому все более широко используют электронные регуляторы. В электронных регуляторах (рис.17) в качестве сигнала обратной связи, пропорционального действительному значению частоты вращения, используют, например, ЭДС обмотки якоря. При увеличении указанной величины увеличивают угол регулирования симистора, что приводит к уменьшению частоты вращения двигателя. Точность стабилизации при таком способе составляет 10%. Существуют более сложные (но и более дорогие) способы. Двигатели постоянного тока с возбуждением от постоянных магнитов В настоящее время такие двигатели выпускают в основном с напряжением питания 12 В и используют в приводах автомобилей, пишущих машин, медицинском и бытовом оборудовании. Конструкции двигателей с постоянными магнитами очень разнообразны. Это объясняется различными требованиями к рабочим характеристикам и стоимости двигателей.
На рис.18,а показаны элементы конструкции простых и дешевых двигателей с кольцевыми магнитами из соединений феррита (1 - магнитысегменты; 2 - ротор; 3 - пакет статора; 4 - полюс; 5 - кольцевой магнит; 6 - радиальная намагниченность; 7 - диаметральная намагниченность; 8 - прямоугольный магнит). Эти магниты намагничиваются в радиальном или аксиальном направлении. Корпус двигателя изготавливают из шихтованного магнитомягкого материала либо в форме цилиндра, либо в виде горшка вытянутой формы. Корпус служит для замыкания магнитного потока постоянных магнитов. Пакет ротора набирают из листов электротехнической стали без добавок кремния (толщиной 1 мм). Ротор располагается в самоцентрирующих подшипниках, он содержит небольшое количество пазов, что позволяет снизить стоимость обмотки якоря. На рис.18,б показаны элементы более дорогих конструкций двигателей с постоянными магнитами (где 9 - полюса; 10 - полюсные башмаки). В них используют магнитотвердые материалы альнико (Al, Ni, Co) и магниты, изготовленные из редкоземельных металлов. Эти двигатели имеют массивный корпус, а ротор изготовляют из высококачественной электротехнической стали. КПД таких двигателей превышает 80%. Включение двигателя. Если двигатель постоянного тока получает питание от аккумуляторной батареи, то при необходимости регулирования его частоты вращения используют импульсные регуляторы (рис.19,а, где U - напряжение питания; Uм импульсное напряжение; Ra, La и Ui - соответственно активное сопротивление, индуктивность и ЭДС обмотки якоря; Фр - магнитный поток полюса). На рис.19,б показаны форма напряжения Uм и тока i(t) в двигателе. Число оборотов двигателя прямо пропорционально скважности импульсов напряжения, включаемых с помощью тиристора или мощного транзистора.
Питание двигателя постоянного тока от сети переменного тока осуществляют через выпрямитель, включенный по однофазной мостовой схеме (рис.20). В этом случае управлять частотой вращения можно способом, описанным выше.
Еще одна возможность управления частотой вращения заключается в использовании щеток с регулируемым положением относительно якоря. Напряжение питания можно подавать на щетки, расположенные на геометричекой нейтрали (а-а) или на одну из этих щеток и дополнительную щетку а' (рис.21), расположенную под углом β относительно второй щетки. В этих двух случаях соотношение частот вращения двигателя имеет вид n0/n = 2/(1 + cos β). Двигатели постоянного тока с немагнитным ротором. В серводвигателях и в двигателях устройств автоматики часто предъявляют повышенные требования к значениям электромагнитных или электромеханических постоянных времени, которые должны быть как можно меньше. Для решения этой задачи разработаны два типа конструкций двигателей: 1) с полым или колоколообразным; 2) с дисковым ротором. Первые выпускают на мощность 1 - 20 Вт, вторые - на мощность свыше 20 Вт.
В двигателях с полым ротором последний выполнен в виде стакана из синтетического электроизоляционного материала, на поверхности которого закреплена обмотка (рис.22, где 1 - коллектор; 2 - щетка; 3 - корпус; 4 - верхний слой обмотки; 5 - нижний слой обмотки). Ротор вращается в магнитном поле постоянных магнитов, установленных на статоре и образующих двух- или четырехполюсную систему возбуждения.
В двигателях с дисковым ротором последний имеет форму диска, на котором расположены кольцевые или сегментные магниты, создающие магнитный поток в аксиальном направлении (рис.23, где 1 щетка; 2 - цилиндрический и кольцевой магниты; 3 - дисковый ротор).
Магниты могут быть расположены с обеих сторон диска ротора. В двигателях малой мощности диск ротора изготавливают из электроизоляционного материала с печатной или штампованной обмоткой. Вращающий момент на валу двигателя практически не меняется, поскольку обмотка равномерно расположена по окружности ротора. Поэтому такие двигатели наилучшим образом приспособлены для электроприводов, в которых требуется поддерживать стабильную частоту вращения. Для этих двигателей не нужен коллектор, который используют в обычных двигателях постоянного тока, поскольку щетки скользят по концам проводников печатной обмотки. В двигателях большей мощности используют ротор с обмоткой, заливаемой специальным составом для ее крепления на роторе. Такие двигатели имеют обычную конструкцию коллектора. Вентильные двигатели В современных микроприводах к двигателям предъявляют все более жесткие требования. С одной стороны, они должны обладать высокой надежностью и простотой конструкции асинхронных двигателей, с другой стороны, - простотой и большим диапазоном регулирования частоты вращения двигателей постоянного тока. Двигатели с электронными схемами управления, или вентильные двигатели, в полной мере соответствуют этим требованиям. При этом они не имеют недостатков асинхронных (потребление реактивной мощности, потери в роторе) и синхронных двигателей (пульсация частоты вращения, выпадение из синхронизма). Вентильные двигатели являются бесконтактными машинами постоянного тока с возбуждением от постоянных магнитов с одно- или многообмоточным статором. Коммутация обмоток статора осуществляется в зависимости от положения ротора. В состав электронной схемы управления входят специальные датчики положения ротора. Вентильные двигатели используют в высококачественных приборах и аппаратах, например, в электроприводах магнитофонов и видеомагнитофонов, в измерительной технике, а также в тех электроприводах, в которых требуется обеспечить с высокой точностью позиционирование ротора и связанного с ним рабочего органа. В этом качестве они успешно конкурируют с шаговыми двигателями. В коллекторных двигателях постоянного тока магнитный поток возбуждения имеет одно и то же направление и неподвижен в пространстве. Намагничивающая сила обмотки якоря Θ2 расположена под углом 90° относительно магнитного потока возбуждения Ф1 (рис.24). Благодаря коллектору угол 90° сохраняет свое значение и при вращении ротора.
У вентильного двигателя на роторе расположены постоянные магниты, создающие магнитный поток возбуждения, а обмотка якоря расположена на статоре (рис.25, а - в исходном положении; б - при повороте на угол α). Питание обмотки статора производится таким образом, что между ее намагничивающей силой Θ1 и потоком возбуждения Ф2 сохраняется угол 90°. При вращающемся роторе такое положение может сохраняться при переключении обмоток статора. При этом обмотки статора должны переключаться в определенные моменты и с заданной последовательностью.
Положение ротора определяется, например, с помощью датчика Холла. Датчик положения управляет работой электронных ключей (транзисторов). Таким образом, без электронной схемы работа вентильного двигателя невозможна. При увеличении числа обмоток статора увеличивается сложность электронной схемы управления. Поэтому в таких двигателях обычно используют не более четырех обмоток. Дешевые конструкции двигателей содержат одну обмотку. Схема однообмоточного двигателя изображена на рис.26,а. На статоре расположена одна обмотка 1, которая подключается к напряжению питания с помощью транзистора VT1 (рис.26,б). Ротор двигателя выполнен из постоянного магнита и имеет одну пару полюсов. Управляющий сигнал на базу транзистора подается датчиком Холла HG. Если этот датчик попадает в магнитное поле, например, дополнительного магнита, то на его выходе появляется напряжение Uн, которым и включается транзистор. Транзистор может быть только открыт или только закрыт.
На рис.27,а показано расположение датчика Холла и дополнительного магнита (сечение по оси), а на рис.27,б - поперек оси. Датчик Холла реагирует на северный полюс дополнительного магнита (N).
На рис.28,а показана конструктивная схема двухобмоточного двигателя.
На статоре расположены две обмотки 1 и 2, по которым либо протекают токи противоположных знаков, либо обмотки имеют противоположные направления намотки. Обмотки коммутируют с помощью транзисторов VT1 и VT2 (рис.28,б) по очереди. Для этого датчик Холла должен иметь два выхода, на одном импульс появляется при прохождении северного полюса дополнительного магнита, на другом - при прохождении южного полюса. Указанный режим можно осуществить и в однообмоточном двигателе, но для этого нужно иметь два источника питания и два транзистора. В этом случае говорят об однообмоточном двигателе с биполярным питанием. На рис.29,а показана схема трехобмоточного двигателя. На его статоре имеются три обмотки (1, 2, 3), расположенные по его окружности под углом 120° по отношению друг к другу. Каждая из обмоток подключена к источнику питания через отдельный транзисторный ключ. Для управления транзисторами используют три датчика Холла. По каждой из обмоток ток протекает в течение одной трети периода. Этот импульсный ток имеет постоянную составляющую, которая не создает вращающего момента, но увеличивает потери на нагрев обмоток. Трехобмоточный двигатель можно включить по двухполупериодной схеме, которая содержит шесть транзисторов (рис.29,б).
Двигатель с четырьмя обмотками на статоре является сравнительно недорогим, поскольку при четырех транзисторах в нем используются только два датчика Холла, что упрощает схему управления. Обмотки 1-4 (рис.30,а,б) расположены на статоре под углом 90°. Датчики Холла возбуждаются постоянными магнитами ротора двигателя. Имеются два способа управления двигателем: с 90- и 180-градусной коммутацией. При 90-градусной коммутации в любой момент времени ток протекает только по одной обмотке из четырех.
Схема управления двигателем показана на рис.31, а расположение управляющих магнитов и датчиков Холла - на рис.32. При таком расположении транзисторы включаются в следующем порядке: VT1, VT3, VT2, VT4.
При 180-градусной коммутации конструкция двигателя та же, но в каждой из четырех обмоток ток протекает в течение полупериода, что приводит к перекрытию токов в обмотках. Датчики Холла работают не от постоянных магнитов, а от намагниченного ротора. Поэтому форма выходного напряжения датчиков Холла - косинусоидальная, а транзисторы VT1-VT4 работают не в импульсном, а в линейном режиме. Режим 180-градусной коммутации можно реализовать и в двухобмоточном двигателе, если в цепь каждой обмотки включить два транзистора с двумя источниками питания. Для поддержания заданного значения частоты вращения вентильного двигателя можно использовать схему рис.33.
В качестве сигнала обратной связи используется ЭДС обмотки статора, которая пропорциональна частоте вращения ротора. На диодах собрана схема отбора максимального напряжения. Из четырех диодов открыт только один, у которого в данный момент наибольшее напряжение. В результате получается четырехфазный выпрямитель, его постоянная составляющая выходного напряжения пропорциональна частоте вращения. На входе транзистора VT6 включен конденсатор С6, который сглаживает пульсации выпрямителя. При увеличении частоты вращения ток транзистора VT6 увеличивается, что приводит к уменьшению тока в транзисторе VT5, а значит, снижается ток с выходов датчиков Холла на транзисторы VT1-VT4. Это приводит к уменьшению частоты вращения двигателя. Шаговые двигатели Существует множество устройств и аппаратов, в которых на электропривод возлагается задача быстрого и точного позиционирования того или иного узла или рабочего органа. В этих случаях используют электродвигатели с дискретным (шаговым) перемещением ротора. Двигатель, преобразующий электрические импульсы в механические, называется шаговым двигателем.
В состав шагового электропривода кроме шагового двигателя входит электронный блок управления (рис.34), где 1 - задатчик; 2 - схема управления; 3 - электронный блок или микропроцессор; 4 - коммутатор; 5 - силовой блок; 6 - питающая сеть; 7 - двигатель). Шаговые двигатели работают в основном по принципу синхронного двигателя, поэтому они имеют и схожие недостатки - возможность выпадения из синхронизма и склонность ротора к колебаниям при отработке шага. Конструкция. Шаговый двигатель состоит как бы из нескольких двигателей, обмотки которых имеют прямое и обратное направления намотки. Поскольку обмотки равномерно распределены по окружности статора, ротор шагает за последовательно переключаемыми обмотками (рис.35). Ротор изготавливают из магнитно-твердого или магнитно-мягкого материала, а также их комбинации. В двух последних случаях на роторе имеются зубцы. На рис.35,б каждая часть ротора имеет четыре зубца. При количестве m пакетов и 2р полюсов ротор за один оборот делает z шагов z = 2pm. Количество шагов определяет величину шага по углу αt; = 2п/z. Конструкция на рис.35,б имеет m = 3 и 2р = 4, что соответствует z = 12 и α = 30°.
Режим работы с переключением одиночных обмоток называют режимом полного шага. Однако возможно одновременное включение двух соседних обмоток в конструкции рис.35,а. при этом ротор поворачивается на половину шага. Этот режим называют режимом дробного шага. При этом в выражение для z нужно ввести коэффициент k, учитывающий режим работы двигателя. Для режима полного шага k = 1, для режима дробного шага k = 2. Дробление шага позволяет уменьшить количество обмоток, упростить схему управления и снизить стоимость электропривода. Кроме увеличения количества обмоток уменьшить шаг можно за счет увеличения числа полюсов или зубцов ротора. В этом случае предъявляют повышенные требования к точности изготовления ротора. К тому же многополюсный ротор гораздо сложнее намагничивать. Поэтому зубчатым изготавливают не только ротор, но и статор (рис.36).
Статор и ротор имеют некоторое отличие в числе зубцов. "Лишние" зубцы ротора расположены между полюсами статора. В такой конструкции также можно реализовать режимы полного и дробного шага. Если по обмотке статора пропускать токи определенного значения, то в принципе можно обеспечить получение любого шага, однако это приведет к значительному усложнению блока управления. Для уменьшения шага можно использовать также редукторы. В этом случае увеличивается момент на валу приводимого во вращение механизма и уменьшается его момент инерции, а трение в редукторе способствует демпфированию колебаний ротора шагового двигателя. Но использование редуктора приводит к увеличению погрешности отработки шага. Двигатель с ротором из постоянного магнита называют двигателем с активным ротором (РМ-двигатель). Двигатель, ротор которого изготовлен из магнитномягкого материала, называют двигателем с реактивным ротором (VR-двигатель). В этом двигателе должно быть не менее трех обмоток, в то время как в РМ-двигателе достаточно иметь две обмотки. Кроме того, имеются конструкции, сочетающие в себе особенности двигателей с активным и реактивным ротором. В этих гибридных конструкциях на роторе из постоянного магнита имеются также и зубцы. Сравнение трех типов шаговых двигателей приведено в табл.1 Таблица 1
Шаговые двигатели могут обеспечивать не только вращательное, но и поступательное движение механизма электропривода. Такие шаговые двигатели называются линейными. Они используются, например, для позиционирования различных устройств на плоскости X-Y, при этом перемещение по каждой координате осуществляется с помощью отдельной обмотки. Кроме электромагнитных линейных шаговых двигателей существуют пьезоэлектрические. На рис.37,а показана схема такого двигателя. В его конструкцию входят два электромагнита М1 и М2 (1), которые могут скользить по стальной балке 4, и пьезоэлектрический трос 3.
Конструкция пьезоэлектрического троса поясняется на рис.37,б. Если на электроды 2 подать напряжение, то в зависимости от его полярности элементы троса 5 сожмутся или растянутся. При подаче напряжения на обмотки электромагнитов они зафиксируются на стальной балке. На рис.37,в показаны последовательность импульсов напряжения, подаваемых на обмотки электромагнитов и на электроды пьезоэлектрического троса, а также процесс перемещения электромагнитов. Схемы управления. На рис.38 изображены схемы управления шаговыми двигателями, в которых реализуются два основных способа управления - униполярный и биполярный. При униполярном управлении (рис.38,а) используется двухпакетный шаговый двигатель, на каждом пакете статоров А и В которого расположены по две обмотки А1, А2 и В1, В2. Обмотки каждого пакета образуют пару полюсов и создают намагничивающую силу разного знака.
На рис.39 приведена схема включения двигателя с гибридным ротором. Кольцевая обмотка каждого пакета статора с когтеобразными полюсами содержит две полуобмотки.
Схема управления рис.38,а отличается простотой, но при этом ухудшается использование двигателя, так как в работе находится только одна из двух обмоток статора. При биполярном управлении (рис.38,б) использование двигателя повышается, хотя одновременно усложняется и схема управления. Поэтому такой способ управления используется в электродвигателях с повышенными требованиями к массогабаритным показателям. Управление электродвигателями Уравнения, описывающие двигатель по каждой фазе, имеют вид: Vm = Rm Im + Em; Em = K1w; M = K2Im, где Vm - подводимое напряжение; Im - потребляемый ток; Em - напряжение самоиндукции; Rm - сопротивление обмотки; M момент сил на валу; w - угловая скорость вращения ротора; К1 и К2 - коэффициенты пропорциональности. Таким образом, по каждой фазе подводимого напряжения двигатель представляется эквивалентной схемой, состоящей из последовательно включенных резистора и источника напряжения. Резистор представляет собой сопротивление обмоток, источник напряжения - напряжение самоиндукции обмоток (рис.40).
Двигатели работают в одном из двух режимов. В первом режиме частота вращения двигателя задается частотой подводимого к нему напряжения. Во втором режиме двигатель сам путем переключения обмоток щетками или коммутацией обмоток по сигналам от датчиков положения устанавливает частоту вращения в зависимости от приложенного напряжения и нагрузки на валу. Управление двигателями постоянного тока сводится к подаче на него требуемого напряжения заданной полярности, так как величина напряжения задает скорость, а полярность - направление вращения. Типичная схема выходного каскада и действие команд управления показаны на рис.41.
От схемы управления подаются сигналы F (forward) - вперед и R (reverse) - назад. При подаче этих сигналов меняется полярность напряжения, прикладываемого к двигателю. Если эти команды одновременно поданы (F = R = 1) или сняты (F = R = 0), то двигатель работает либо в режиме торможения, либо в режиме останова. Различие между ними заключается в том, что в режиме торможения двигатель практически замкнут накоротко. В режиме останова двигатель работает в условиях, близких к холостому ходу, т.е. вращается по инерции. Наиболее быстро двигатель останавливается при торможении, так как запасенная в роторе кинетическая энергия рассеивается на сопротивлении обмотки. Как видно на рис.41, напряжение, прикладываемое к двигателю, не может быть больше напряжения на выводе управления Vc (voltage control). Напряжение на этом выводе не линейно, но монотонно связано с напряжением на двигателе, поэтому его используют для управления скоростью. На рис.42 показано применение микросхемы ВА6219В фирмы ROHM для управления двигателем постоянного тока ведущего вала видеомагнитофона. Здесь, как и выше, команды F и R задают направление вращения. Они подаются с микро-ЭВМ, управляющей лентопротяжным механизмом, напряжение управления Vc вырабатывается в сервопроцессоре
Управление шаговыми двигателями ДДля шагового двигателя поворот на минимальный угол (шаг) производится при смене фазы питающего напряжения. Для двигателя, имеющего р пар полюсов, шаг равен π/(np). Для удобства задания количества шагов в двоичном коде число обмоток выбирают равным степени числа 2 (обычно 4). Напряжения бегущей волны, создающие вращающееся магнитное поле, формируются из сигналов, поступающих на вход схемы управления в цифровом виде. Особенностью работы шагового двигателя является то, что после поворота на заданный угол ротор должен сохранять занятое положение, т.е. по обмоткам должен протекать ток. Поэтому обмотки запитываются током, а не напряжением. Наглядный вариант выходного каскада схемы управления шаговым двигателем показан на рис.43.
Цифровые сигналы D0 и D1, из которых формируются напряжения бегущей волны, вырабатываются реверсивным счетчиком СТ2. В счетчик по команде записи WR загружается число шагов NS. Счетчик считает до тех пор, пока его содержимое не станет равным нулю. В этот момент на выходе переноса Р появляется нуль, и счет прекращается, так как сигналом Р закрывается вентиль, подающий импульсы частоты шагания FS на счетный вход счетчика. Частота шагания обычно формируется из тактовой частоты счетчиком или таймером. Сигнал FR задает направление счета и, следовательно, направление вращения двигателя. Сигнал STOP служит для останова двигателя. Практические схемы управления имеют более разветвленную логику управления, мостовой выходной каскад и, как правило, содержат широтно-импульсный ограничитель тока. Логика управления обычно дополняется сигналами запрета и поворота фаз. Мостовой выходной каскад устанавливают, чтобы изменять направление тока в обмотке двигателя при питании от однополярного источника. Команда поворота фаз изменяет направление тока: в зависимости от ее значения работают транзисторы только одной из диагоналей выходного каскада. Широтно-импульсный ограничитель тока служит для снижения мощности, рассеиваемой выходным каскадом. Устройство типовой схемы управления шаговым двигателем показано на рис.44 (только один выходной каскад).
Вход Р управления полярностью открывает вентиль G1 или G2, поэтому цифровой сигнал со входа IN1 (вход фазы 1) открывает транзисторы только одной из диагоналей моста: Т1, Т4 при Р = 1 и Т2, Т3 при Р = 0. Соответственно изменяется полярность напряжения, прикладываемого к обмотке двигателя. Широтно-импульсный ограничитель состоит из токоизмерительного резистора, компаратора и таймера. Таймер состоит из диода, RC-цепочки и триггера Шмитта. Ограничитель стабилизирует ток в обмотке по уровню Imax =Vref/Rs следующим образом. Предположим, что в данный момент времени Р = 1, IN1 = 1, Q = 1 (конденсатор RC-цепочки таймера разряжен), напряжение на токоизмерительном резисторе Rs меньше Vref: IL Rs < Vref (IL - ток через индуктивность обмотки). В этом случае открыты транзисторы Т1 и Т4, а ток IL плавно нарастает до Imax. После срабатывания компаратора через диод D зарядится конденсатор RC-цепочки таймера. На время Тм (длительность разряда конденсатора) закроются транзисторы Т1 и Т4. В течение этого времени к обмотке прикладывается напряжение обратной полярности, и ток уменьшается на величину dI = VL(Tм/L). VL = Vм - напряжение на обмотке, L - индуктивность обмотки двигателя. После окончания импульса таймера откроются транзисторы Т1 и Т4, и полярность напряжения на обмотке изменится снова. Ток в обмотке снова начнет нарастать, причем на величину dI он нарастет практически за то же время Тм, так как во время спада тока напряжение на обмотке практически такое же, как и во время нарастания. Следовательно, средний ток Iw в обмотке Iw = Imax - dI/2. Шаговый двигатель можно заставить работать в режиме свободного хода, тогда его скорость будет определяться приложенным напряжением и нагрузкой на валу. Для этого нужно, чтобы импульсы, из которых формируются напряжения бегущей волны, вырабатывались как функция угла поворота ротора, т.е. его положения. Устройство и работа схемы управления шаговым двигателем в режиме свободного хода показаны на рис.45.
Для ясности рассматриваемый двигатель имеет одну пару полюсов ротора и две обмотки статора. Обмотки подключены через токоограничивающие резисторы, напряжения с датчиков поступают на входы триггеров Шмитта. На рис.45,в показаны все четыре возможные комбинации знаков тока в обмотках и соответствующие им положения ротора. Они находятся под углом 45° к вертикали, точно напротив датчиков положения. При нахождении ротора в окрестности датчика срабатывает соответствующий триггер, в результате в обмотки подается ток, притягивающий ротор к следующему по ходу вращения датчику. При вращении в отрицательном направлении (по часовой стрелке) контакт переключателя поднят вверх (FR = 1), напряжение V1 коммутирует ток I1 в обмотке 1, V0 - ток I0 в обмотке 0. В исходном положении, когда по обмоткам не протекает ток, ротор притянут полюсом к сердечнику одной из катушек, т.е. занимает положение под углом 0 или 90° к вертикали. При подаче питания триггеры установятся в какие-то состояния, ротор будет стремиться занять соответствующее положение. При этом он либо достигнет, либо пройдет мимо датчика, вызывая перебрасывание соответствующего триггера, после чего начнется равномерное вращение ротора. Заметим, что описанная процедура работы и особенно запуска надежны, если датчики вырабатывают напряжение только по положению, без влияния скорости ротора. Наиболее простыми и надежными датчиками, обладающими этими свойствами, являются датчики Холла, поэтому они практически вытеснили все другие типы датчиков, применяемых в двигателях. В кассетном магнитофоне обычно устанавливают один двигатель постоянного тока, который не меняет направления вращения. В подавляющем большинстве магнитофонов установлен двигатель с трехполюсным ротором, работа и устройство которого показаны на рис.45.
Требования к стабильности скорости удовлетворяются схемой стабилизатора, работающего на измерении напряжения самоиндукции двигателя. Это напряжение прямо пропорционально скорости вращения и, следовательно, может служить датчиком скорости. Схема стабилизации должна поддерживать напряжение самоиндукции, равное заданному. На рис.46 изображена одна из наиболее наглядных схем, реализующих эту идею. В этой схеме стабилизация скорости проводится сравнением напряжений на двигателе и его модели. Двигатель представлен резистором Rм и источником напряжения Ем. Модель состоит из резистора R2 и источника напряжения управления Vc. Резистор R2 представляет сопротивление двигателя; Vc - задаваемое напряжение самоиндукции. Резисторы R1, Rм, R2, R3 образуют мост для измерения разницы напряжений Vc и Ем. При достаточно большом коэффициенте усиления можно считать V1 = V2, и двигатель будет вращаться с заданной скоростью w0 независимо от нагрузки на его валу.
На рис.47 приведена структурная схема интегральной микросхемы TA7768F фирмы Toshiba, в которой опорное напряжение непосредственно вычитается из напряжения двигателя. Для применения этой микросхемы необходимо знать отношение сопротивления резисторов R1/R2.
Для фиксированной скорости наиболее популярна трехвыводная схема (рис.48). В ней на резистор R1 через токовое зеркало подается ток kIм, пропорциональный току Iм, протекающему через двигатель. Ток резистора R2 и ток, потребляемый схемой управления, также протекают по резистору R1, поэтому ток двигателя должен быть достаточно большим, чтобы ими можно было пренебречь.
В магнитофонах с реверсивным движением ленты требуется стабилизировать скорость вращения двигателя в обоих направлениях. Для этого обычный стабилизатор дополняют переключателем для подключения двигателя в определенной полярности. При настройке описанных схем вначале подбирают резистор, имитирующий сопротивление обмоток двигателя, из условия минимального влияния нагрузки на скорость двигателя. Затем подбирают резистор, задающий скорость вращения. Двигатель ведущего вала видеомагнитофона используют многофазный, чтобы снизить неравномерность его вращения, а на обмотки подают синусоидальные напряжения. В подавляющем большинстве случаев применяют трехфазные двигатели с датчиками Холла. Устройство двигателя показано на рис.49,а. Его работа такая же, как у шагового двигателя.
Схема рис.49,а состоит из трех идентичных блоков (каналов), в каждом из которых формируется напряжение V для обмотки своей фазы. Блок состоит из датчика, триггера Шмитта, формирователя и выходного каскада. Двигатель представлен двухполюсным ротором, обмотки расположены напротив датчиков. В момент, изображенный на рис.49,а, северный полюс ротора расположен у датчика фазы А, т.е. до этого момента времени по обмотке фазы А протекал ток, притягивающий к ней полюс ротора. При приближении ротора к датчику фазы А наводимое в нем напряжение перебрасывает триггер фазы А. Перебрасывание триггера вызывает подачу тока в другую фазу обмотки в зависимости от направления вращения: чтобы ротор вращался против часовой стрелки, нужно подавать ток в обмотку фазы С, а чтобы вращался по часовой стрелке - в обмотку фазы В. Временная диаграмма работы приведена на рис.49,б. Стабилизация скорости вращения ведущего вала производится по импульсу переключения головок с точностью до фазы. Импульс переключения головок представляет собой симметричный импульс кадровой частоты, однозначно привязанный к полям кадра. При записи используется импульс, подаваемый на управляющую головку, при воспроизведении считываемый с нее. Структурная схема управления двигателем ведущего вала показана на рис.50.
Датчик скорости представляет собой укрепленный на роторе двигателя зубчатый диск и датчик Холла, расположенный на статоре. Частота импульсов напряжения на выходе датчика Холла прямо пропорциональна скорости вращения ротора. Сигнал от датчика скорости усиливается, ограничивается и подается на частотный (ЧД) и фазовый (ФД) детекторы. Выходные сигналы детекторов суммируются и подаются на выходной каскад. К нему же подводятся команды торможения и направления вращения. Напряжение выходного каскада подается на двигатель. В состав интегральных микросхем управления двигателем входят только отдельные узлы структурной схемы рис.50. Наиболее часто в нее включают выходной каскад и усилитель датчика скорости, так как они непосредственно связаны с двигателем. На рис.51,а показана структурная схема микросхемы КА8329 (Samsung), а на рис.51,б - НА13406W (Hitachi).
Расчет электродвигателей Номинальными данными двигателя называют мощность, скорость вращения и напряжение. Мощность двигателя выражается в ваттах. Это не потребляемая от источника мощность, а механическая на валу. Выбор мощности зависит от назначения двигателя. Так, для электрических игрушек и моделей достаточно мощности до 3 Вт, для небольшого вентилятора - 10-15 Вт, для циркулярной пилы - сотни ватт. Мощность двигателя тесно связана со скоростью вращения. При заданной мощности чем выше скорость вращения двигателя, тем меньше его размеры и меньше потребуется материалов. Коллекторные двигатели постоянного и переменного тока можно рассчитать на любую скорость вращения (даже до 10000 об/мин). Но, исходя из условий надежной работы щеток на коллекторе, не рекомендуется строить двигатели на скорость вращения более 5000 об/мин. У асинхронных двигателей всех типов скорость вращения ротора зависит от частоты переменного тока, которая остается неизменной. Для двухполюсных двигателей, которые чаще всего применяют, синхронная скорость при частоте 50 Гц равна 3000 об/мин (учитывая скольжение - 2900 об/мин). Непосредственно такие скорости вращения используют редко, обычно между двигателем и приводимым в движение механизмом ставят редуктор. Напряжение двигателя определяется источником питания. Автомобильный электродвигатель, например, рассчитывают на напряжение аккумулятора. Расчет двигателей постоянного тока начинают с определения двух главных размеров: диаметра и длины якоря. Эти размеры входят в формулу D2l = Pa 109/1,1 AS B n (см3), (1) где D - диаметр якоря, см; l - длина якоря, см; Pa - расчетная мощность, Вт; AS - линейная нагрузка якоря, А/см; B -магнитная индукция в воздушном зазоре, Гс; n - номинальная скорость вращения, об/мин. Левая часть формулы (1) пропорциональна объему якоря. Как видно из правой части (1), объем якоря пропорционален мощности двигателя Pa и обратно пропорционален скорости вращения n. Отсюда можно сделать вывод, что чем большую скорость вращения имеет якорь двигателя, тем меньше получаются его размеры, а от размеров якоря зависят размеры и остальных частей двигателя. Расчетная мощность двигателя Pa = E I = P(1 + 2y)/3y (Вт), (2) где Е - ЭДС, наводимая в обмотке якоря при его вращении в магнитном поле; I - ток, потребляемый двигателем от источника, А; P - номинальная мощность двигателя, Вт; y - КПД двигателя, значение которого можно определить по рис.52 (как видно по кривой, значение КПД резко снижается при уменьшении мощности двигателя). Расчетная мощность двигателя всегда больше номинальной.
Ток, потребляемый двигателем I = P/U y (А), (3) где U - номинальное напряжение. Определим ЭДС Е: Е = Pa/I (В). (4) Линейная нагрузка якоря AS = NI/2πD (А/см). (5) В формуле (5) N обозначает число проводников обмотки якоря, двойка в знаменателе показывает, что общий ток якоря I разветвляется между двумя проводниками обмотки, произведение πD - длина окружности якоря. Линейную нагрузку AS и магнитную индукцию в воздушном зазоре B называют электромагнитными нагрузками. Они показывают, насколько сильно нагружен двигатель в электрическом и магнитном отношениях. Эти значения не должны превосходить определенного предела, иначе двигатель будет перегреваться при работе. Нагрев двигателя зависит не только от электромагнитных нагрузок, но и от времени его работы. Некоторые двигатели работают длительное время без остановки (двигатели вентиляторов). Другие двигатели работают с перерывами, во время которых они успевают остыть (двигатели пылесосов, холодильников). Работа двигателя с перерывами называется повторно-кратковременной. Определить линейную нагрузку и магнитную индукцию можно по рис.53 и 54 (где по горизонтальной оси отложены номинальные мощности, деленные на номинальные скорости вращения, например, при мощности 15 Вт и скорости 3000 об/мин нужно принять по оси абсцисс цифру 5).
Обратимся к формуле (1). В ней диаметр и длина якоря связаны между собой определенным соотношением. Обозначим отношение l/D = k. Значение k для малых двигателей находится в пределах от 0,7 до 1,2. Если требуется двигатель с меньшей длиной, но с большим диаметром, то выбирают k = 0,7. Наоборот, если двигатель нужно поместить в трубу небольшого диаметра, то выбирают k = 1,2. Вводя отношение l/D = k в (1), мы освобождаемся от одного неизвестного l, и формула (1) получает такой вид: D = (Pa 109/1,1k AS B n)1/3 (cм). (6) Вычислив значение D, через коэффициент k находим l. Таким образом, определены главные размеры двигателя. Теперь рассчитаем обмотки якоря. Для этого нужно определить магнитный поток двигателя. Если магнитную индукцию в воздушном зазоре умножить на площадь, через которую силовые линии входят в якорь, то получим поток двигателя Ф = B a t l, (7) где t - полюсное деление, т.е. часть окружности якоря, приходящаяся на один полюс. В двухполюсном двигателе t = πD/2. Коэффициент а обычно принимают равным 0,65. Значение B находим по графику рис.54. Число проводников якоря определяем по формуле N = E 60 108/Ф n. (8) Число проводников не может быть любым целым числом. Проводники обмотки якоря должны быть поровну распределены по пазам якоря. Число пазов Z определяем из соотношения Z = 3D. Рекомендуется брать ближайшее нечетное число. Число проводников в пазу Nz = =N/Z должно быть четным, чтобы намотать обмотку в два слоя. Этот выбор будет пояснен на примере. Сечение провода для обмотки якоря S можно определить, разделив ток в проводнике I на плотность тока g: S = I/2g. Для выбора плотности тока можно руководствоваться кривой 1 рис.55.
Это сечение является предварительным. По справочнику (например, "Радиокомпоненты и материалы", с.8) нужно найти сечение стандартного провода, которое наиболее близко подходит к вычисленному. В той же таблице найдем и диаметр провода d. Теперь определим размер паза. Его сечение W, необходимое для размещения проводов обмотки, W = d2 Nz/Kз (мм2). (9) Коэффициент Kз называют коэффициентом заполнения паза. Он показывает, насколько плотно проводники заполняют паз. При расчетах можно брать Kз = 0,6-0,7. При изготовлении якоря сечение паза должно быть еще больше, чем по формуле (9), так как в нем должны еще поместиться изоляционная гильза 2 толщиной 0,2 мм и клин 3 из картона толщиной 0,3 мм (рис.56).
Площадь, занимаемая гильзой, Sг = p tг (мм2), (10) где p - периметр паза, мм; tг - толщина гильзы, мм. Площадь клина Sк = hк bк (мм2), (11) где hк - толщина клина, мм; bк - ширина клина, мм. Таким образом, полное сечение паза равно Sп = W + Sг + Sк. Для круглого паза диаметр можно определить по его полному сечению dп = 2 Sп/п (мм). Определив размер паза по рис.56, можно рассчитать толщину зубца. Сначала найдем диаметр окружности Dn, на которой будут лежать центры пазов. Для этого надо из диаметра якоря вычесть диаметр паза + 1 мм Dn = D - (dn + 1). Расстояние между соседними пазами t = пDn/Z (мм), толщина зубца bz = t - dn (мм). (4) Толщина зубца в узком месте должна быть не менее 2 мм. Если этого не получается, надо выпиливать пазы сложной формы, а поскольку это сложно, можно увеличить диаметр якоря с таким расчетом, чтобы получить зубцы толщиной не менее 2 мм. Прорезь паза "а" должна быть на 1 мм больше диаметра провода dиз. Сечение угольной или графитовой щетки Sщ = I/dщ, (5) где dщ - плотность тока под щеткой. Переходим к расчету магнитной системы. Для самодельного двигателя проще всего применять магнитную систему открытого типа (рис.57, где 1 - пропитанная бумага; 2 - фланц; 3 - катушка).
Прежде всего определим воздушный зазор q между якорем и полюсами. В машинах постоянного тока берут увеличенный зазор, который уменьшает размагничивающее действие магнитного поля якоря. Воздушный зазор q = 0,45 t AS/B (см). (6) Размеры магнитной системы рассчитываем по магнитным индукциям. При расчете магнитногй системы полюсов и станины величину магнитного потока следует увеличить на 10%, так как часть силовых линий замыкается между сторонами станины, минуя якорь. Поэтому магнитный поток полюсов и станины Фст = 1,1Ф. Индукцию в станине принимаем Вст = 5000 Гс (0,5 Тл). Длину станины Lст определим по эскизу рис.58.
Если форма станины соответствует рис.59 (где 1- катушка; 2 - полюс; 3 - заклепка), то поток станины Фст нужно разделить пополам, так как он раздваивается по двум параллельным путям.
На рис.58 штриховой линией показан путь магнитного потока. Он состоит из следующих участков: два воздушных зазора, два зубца, якорь и станина. Чтобы узнать, какую намагничивающую силу Iw должна иметь катушка возбуждения, надо рассчитать Iw для каждого из этих участков, а затем все их сложить. Начнем с воздушного зазора. Намагничивающая сила воздушного зазора Iw = 1,6 qkB, (7) где q - воздушный зазор со стороны якоря (см); k - коэффициент, который можно принять k = 1,1; В - индукция в воздушном зазоре (Гс). Для определения намагничивающей силы (н.с.) зубцов якоря нужно знать индукцию в зубце. Толщину зубца определим по формуле (4). Магнитный поток входит в зубец через часть окружности якоря, приходящуюся на один зубец. Она называется зубцовым делением и определяется по формуле t1 = пD/Z. (8) Индукция в зубце будет во столько раз больше индукции в воздушном зазоре, во сколько раз толщина зубца меньше зубцового деления. Кроме того, надо учесть, что часть длины якоря занята изоляционными прослойками между листами, которые составляют 10%. Поэтому индукция в зубце Bz = Bt/bz 0,9. (9) Этой индукции по приведенной табл.2 соответствует напряженность поля Hz. Таблица 2
Для расчета н.с. на две высоты зубца надо Hz умножить на двойную высоту зубца Iwz = Hz 2hz. В таблице в вертикальной графе отложена магнитная индукция, выраженная в тысячах гаусс, а в горизонтальной строке - в сотнях гаусс. Если, например, индукция равна 10500 Гс, то нужное значение напряженности поля находят на пересечении строки 10000 и столбца 500 (в данном случае 6,3). Намагничивающую силу можно определить, умножив напряженность на длину силовой линии. При расчете индукции в сердечнике якоря следует учесть, что магнитный поток в нем разветвляется, и поэтому на одно сечение приходится только половина потока. Сечение сердечника якоря (по рис.58) равно расстоянию ha от основания паза до вала, умноженному на длину якоря ha = D/2 - hz - db/2. Также нужно учесть изоляционные прослойки между листами. Таким образом, индукция в сердечнике якоря Ba = Ф/(2hal 0,9). Этой индукции по вышепрведенной таблице соответствует Ha. Намагничивающая сила сердечника якоря Iw = H La, где La - длина силовой линии в сердечнике согласно рис.58: La = п(D - 2hz - ha)/2 (см). Как видно на рис.58, у этого двигателя нет выступающих полюсов, которые слились со станиной. Поэтому расчет неподвижной части магнитопровода сводится к расчету станины. Ширину станины определяем по заданной индукции В = 5000 Гс. Отсюда bcm = Фcm/5000 х l х 0,9 (см). Напряженность поля Нсm для индукции 5000 Гс находим в табл.2. При определении длины силовой линии в станине встречается затруднение. Ведь длина боковой стороны станины зависит от толщины катушки, а она неизвестна. Поэтому возьмем толщину катушки, равную 30 значениям воздушного зазора. Определив по эскизу длину силовой линии в станине Lст, рассчитаем намагничивающую силу (н.с.) для станины Iwcт = Lcт Нcт. Теперь сложим н.с. всех участков Iw0 = Iwd + Iwz + Iwa + Iwcт . Такую н.с. должна создать катушка при холостом ходе двигателя, но при нагрузке появится размагничивающее действие магнитного поля якоря. Поэтому нужен запас, который подсчитаем по формуле Iwp = 0,15 t AS (А-витков). (10) Число витков катушки можно подсчитать по сумарной Iw: w = Iw/I. Для определения сечения провода нужно ток разделить на плотность тока (определяем по кривой 2 рис.55. По таблицам справочника "Радиокомпоненты и материалы" находим ближайшее стандартное сечение и диаметр провода в изоляции dиз. Площадь, занимаемая витками катушки, F = wdиз2/kз (kз - коэффициент заполнения). Разделим площадь F на длину катушки (на эскизе lк) и получим ее ширину bк = F/lк. Пример расчета двигателя постоянного тока Номинальные данные двигателя: Р = 5 Вт, U = 12 В, n = 4000 об/мин. По кривой рис.52 определяем КПД двигателя 30%, по формуле (2) - расчетную мощность двигателя Ра = 5 (1 + 2х0,3)/3х0,3 = 8,9 Вт. Для нахождения значений AS и В по кривым рис.53 и 54 вычислим отношение мощности двигателя, выраженной в милливаттах, к скорости вращения 5000/4000 = 1,25. По рис.53 находим AS = 50 A/см. Аналогично по рис.54 находим индукцию в воздушном зазоре В = 2200 Гс. Примем отношение l/D = 1. Подставим численные значения расчетных величин в формулу (6) и найдем диаметр якоря D=(8,9х109/1,1х50х2200х4000)1/2 = 2,6 см. При k = 1 длина якоря l = 2,61 = 2,6 см. Ток якоря по формуле (3) I = 5/0,3х12 = 1,4 А. ЭДС обмотки якоря по формуле (4) Е = 3,14 2,6/1,4 = 6,3 В. Полюсное деление якоря t = 3,14х2,6/2 = 4,1 см. Магнитный поток по формуле (7) Ф = 0,65х4,1х2,6х2200 = 15200. Число проводников обмотки якоря по формуле (8) N= =6,3х60х108/15200х4000 = 620. Число пазов якоря z = 3х2,6 = 7,8. Округляем до ближайшего нечетного числа z = 7. Число проводников в пазу Nz = =620/7= 88. Это число делится на 2, поэтому округлять его не нужно. Сечение проводника обмотки якоря при d=10А/мм2 s = 1,4/2х10 = 0,07 мм2. Согласно кривой 1 рис.55 при сечении 0,07 мм2 надо взять плотность тока 8 А/мм2. Скорректируем сечение провода 0,07х10/8 = 0,085 мм2 и диаметр провода 0,33 мм. С учетом толщины изоляции диаметр изолированного провода равен 0,37 мм2. Сечение паза по формуле (9) S = dиз2 88/0,7 = 17,2 мм2. Диаметр круга, занятого проводниками обмотки d0 = (4х17,2/3,14)1/2 = 4,7 мм. Периметр изоляционной гильзы р = =3,14х4,7 = 14,7 мм. Площадь паза, занимаемая гильзой по формуле (10) Sг = 14,7 0,2 = 2,9 мм2. Площадь паза, занимаемая клином, по формуле (11) Sк = 0,3 3 = 0,9 мм2. Полное сечение паза Sп = 17,2 + 2,9 + 0,9 = 21 мм2. Диаметр паза dп = (4x21/3,14)1/2 = 5,2 мм. Диаметр окружности, на которой расположены центры пазов, Dп = 26 - (5,2 + 1) = 19,8 мм. Расстояние между соседними пазами равно 3,14 19,8/7 = 8,9 мм. Толщина зубца в узком месте bz = 8,9 - 5,2 = 3,7 мм. Прорезь паза а = 0,37 + 1 = 1,37 мм. Число коллекторных пластин К = 7. Сечение щетки Sщ = 1,4/6 = 0,23 см2. Можно взять квадратную щетку с размерами сторон 5 х 5 мм. Воздушный зазор между якорем и полюсом по формуле (6, РЭ 10/2000) равен 0,45x4,1x50/2200 = 0,4 мм. Для определения н.с. катушки проведем расчет магнитной цепи по рис.58. Н.с. воздушного зазора по формуле (7, РЭ 10/2000) Iwd = 1,6x0,04x1,1x2200 = 155 А-витков. Зубцовое деление по формуле (8, РЭ 10/2000) t1 = 3,14x2,6/7 = 1,2 см. Индукция в зубце по формуле (9, РЭ 10/2000) Bz = 2200х1,2/0,37х0,9 = 8000 Гс. Напряженность поля зубца по таблице (РЭ 10/2000, стр.10) Нz = 4,05. Н.с. зубцов Iwz = 4,05х2х0,57 =4,6 Авитков. Индукция в сердечнике якоря Ba = 15200/2х0,5х2,6х0,9 = 6500 Гс. По той же таблице для этой индукции На = 3,2. Н.с. для сердечника якоря Iw = 3,2х1,5 = 4,8 А-витков. Определяем н.с. для неподвижных частей магнитопровода. Магнитный поток станины Фст = 1,1х15200 = 16700. Примем индукцию в станине 5000 Гс. Тогда ширина станины bст = 16700/5000х2,6х0,9 = 1,4 см. Индукции 5000 Гс по таблице соответствует значение Нст = 2,5. Для определения длины силовой линии в станине примем толщину катушки bк=30d=30х0,04=1,2 см. По рис.58 определяем среднюю длину силовой линии Lст = 4,5 см. Н.с. станины Iwcт = 2,5х4,5 = 11 А-витков. Теперь сложим н.с. всех участков Iw0 = 155 + 4,6 + 4,8 + 11 = 175 А-витков. Размагничивающая сила по формуле (10) Iwp = 0,15х4,1х50 = 31 А-виток. Тогда н.с. при нагрузке двигателя Iw = 175 + 31 = 206 А-витков. Число витков катушки w = 206/1,4 = 147 витков. Примем плотность тока в катушке равной 5 А/мм2, тогда сечение провода s = 1,4/5 = 0,28 мм2. Ближайшее сечение стандартного провода s = 0,273 мм2 и диаметр провода 0,59 мм. Диаметр изолированного провода равн 0,64 мм. Площадь, занимаемая витками катушки F = 147х0,642/0,7 = 86 мм2. Длина катушки по рис.58 равна lк = 12 мм. Отсюда толщина катушки bк=86/12=7,2 мм. Расчет однофазных асинхронных двигателей Задаемся мощностью двигателя Р (Вт), напряжением U (В) и скоростью вращения n (об/мин). Расчетная мощность двигателя Pa = P/ ηcosφ. ( 1 )Величина η cos φ берется из кривой рис.60.
Внешний диаметр статора Da = (14Pa)1/3 (см). ( 2 ) Внутренний диаметр статора D = 0,55 Da (см). ( 3 ) Длина статора l = D (см). Полюсное деление t = 3,14 D/2 (см). Магнитную индукцию в воздушном зазоре В выбираем по кривой рис.54. Магнитный поток, как и выше, определяем по формуле Ф = a B t l. Для однофазных двигателей значение "а" можно выбрать равным 0,72. Число пазов статора для двигателей с отключаемой пусковой обмоткой выбираем кратным 6. Для двигателей мощностью до 10 Вт можно взять 12 пазов статора. Из них 8 будут заняты рабочей обмоткой, а 4 - пусковой. Для двигателей большей мощности требуется 18 пазов статора (12 пазов - рабочая обмотка, 6 - пусковая). Число витков рабочей обмотки wp = U 106/2,5 Ф. ( 4 ) Число проводников в пазу рабочей обмотки Nz = 2wp/zp, ( 5 ) где zp - число пазов, занимаемых рабочей обмоткой. Ток в рабочей обмотке I = Pa/U (А). ( 6 ) Сечение проводника рабочей обмотки S = I/d. Диаметр провода в изоляции находим как и выше. Размеры пазов определяем аналогично расчету двигателей постоянного тока. Пусковая обмотка занимает 1/3 пазов статора. Число витков пусковой обмотки зависит от того, какой элемент включается при пуске последовательно с пусковой обмоткой. Если в качестве элемента служит активное сопротивление, то число витков пусковой обмотки берем в 3-4 раза меньше числа витков рабочей обмотки. Но она занимает в 2 раза меньше пазов, следовательно, в каждом пазу будет в 1,5-2 раза меньше витков, чем в пазу рабочей обмотки. Наматываем пусковую обмотку тем же проводом, что и рабочую. Если в качестве пускового элемента применяем конденсатор, то число витков пусковой обмотки равно числу витков рабочей. Чтобы пусковая обмотка поместилась в своих пазах, сечение провода нужно брать вдвое меньшим. Схема обмотки и порядок укладки ее в пазы показаны на рис.61.
Число пазов ротора выбираем в зависимости от числа пазов статора. При 12 пазах статора можно взять 9 пазов ротора, а при 18 пазах статора - 15 пазов ротора. Диаметр паза ротора выбираем так, чтобы общее сечение стержней ротора было в 1,5-2 раза больше общего сечения проводников рабочей обмотки статора. В пазы ротора надо забить медные стержни, которые припаять к замыкающим кольцам на торцах ротора. Сечение замыкающего кольца должно быть примерно втрое больше сечения стержня. Пусковой момент двигателя зависит от сопротивления обмотки ротора, поэтому для двигателя с большим пусковым моментом стержни ротора следует делать из латуни или бронзы. Воздушный зазор между статором и ротором в асинхронных двигателях следует брать по возможности меньшим. В двигателях заводского изготовления зазор обычно равен 0,25 мм. В самодельных двигателях 0,3-0,4 мм. Емкость пускового конденсатора для маломощных двигателей обычно 3-10 мкФ. Следует иметь в виду, что на зажимах конденсатора образуется напряжение, значительно превосходящее напряжение сети, поэтому конденсаторы нужно устанавливать на напряжение, равное тройному напряжению сети. При понижении напряжения емкость конденсатора увеличивается по квадратичному закону, поэтому на рабочее напряжение 12 В пришлось бы взять конденсаторы огромной емкости (до 1000 мкФ). Пример расчета однофазного асинхронного двигателя Номинальные данные: мощность 3 Вт, напряжение 220 В, скорость вращения 3000 об/мин, работа двигателя повторно-кратковременная. По кривой рис.60 находим произведение η cos φ = 0,25. Расчетная мощность двигателя по формуле (1) Ра = 3/0,25 = 12 В.А. Наружный диаметр статора по формуле (2) Da =(14х12)1/3 = 5,5 см. Для упрощения возьмем форму статора в виде квадрата, описанного около наружного диаметра (рис.62).
Внутренний диаметр статора по формуле (3) D = 0,55x0,55 = 3 см. Длина статора l = 3 см. Полюсное деление t = 3,14x3/2 = 4,7 см. Магнитная индукция в воздушном зазоре по верхней кривой (см. рис.54) равна 2800 Гс, но при квадратной форме статора ее приходится увеличивать до 4000 Гс. Магнитный поток Ф = 0,72х4000х4,7х3 = 40600. Число пазов статора 12, из них для рабочей обмотки 8, для пусковой 4. Число витков рабочей обмотки по (4) wp = 220х106/2,5х40600 = 2170 витков. Число проводников в пазу рабочей обмотки Nz = 2х2170/8 = 542. Сила тока в рабочей обмотке по формуле (6) I = 12/220 = 0,055 А. При плотности тока d = 5 А/мм2 сечение провода s = 0,055/5 = 0,011 мм2. Этому сечению соответствует диаметр провода ПЭЛ в изоляции 0,145 мм. При коэффициенте заполнения паза проводниками, равном 0,5, площадь паза, занимаемая проводниками, составляет s = 0,1452х542/0,5 = 27 мм2. Диаметр круга, занятого проводниками обмотки, d0 = (4х27/3,14)1/2 = 5,9 мм. Периметр изоляционной гильзы р = 3,14х5,9 = 18,3 мм. Площадь паза, занимаемая гильзой, Sz = 18,3х0,2 = 3,7 мм2. Площадь паза, занимаемая клином Sк = 0,3х3 = 0,9 мм2. Полное сечение паза S = 27 + 3,7 + 0,9 = 31,6 мм2. Диаметр паза dn =(4х31,6/3,14)1/2 = 6,3 мм, округляем до 6,5 мм. Диаметр окружности, на которой расположены центры пазов, Dn = 30 + (6,5 + 1) = 37,5 мм. Расстояние между соседними пазами t = 3,14х37,5/12 = 9,6 мм. Толщина зубца в узком месте bz = 9,6 - 6,5 = 3,1 мм. Прорезь паза а = 0,145 + 1 = 1,145 мм, округляем до 1,2 мм. Воздушный зазор принимаем равным 0,3 мм. Диаметр ротора Dp = 30 - 2х0,3 = 29,4 мм. Число пазов ротора 9. Общее сечение меди в пазах рабочей обмотки статора 0,011х542х8 = 47 мм2. Общее сечение меди в пазах ротора 47х1,5 = 70,5 мм2. Сечение стержня ротора 70,5 : 9 = 7,8 мм2. Диаметр стержня ротора (4х7,8/3,14)1/2 = 3,1 мм. Ближайший стандартный диаметр проволоки 3,05 мм. Диаметр паза ротора с припуском на забивку стержней 3,05 + 0,25 = 3,3 мм. Диаметр окружности, на которой расположены центры пазов ротора, 29,4 - (3,3 + 1) = 25,1 мм. Расстояние между соседними пазами 3,14x25,1/9 = 8,7 мм. Толщина зубца ротора в узком месте 8,7 - 3,3 = 5,4 мм. Автор: А.Д.Прядко
Искусственная кожа для эмуляции прикосновений
15.04.2024 Кошачий унитаз Petgugu Global
15.04.2024 Привлекательность заботливых мужчин
14.04.2024
▪ Осы могут узнавать друг друга ▪ MAX14001 - универсальный изолированный дискретный вход ▪ Универсальный программатор MPLAB PM3
▪ раздел сайта Акустические системы. Подборка статей ▪ статья Бочка Диогена. Крылатое выражение ▪ статья Работа на дроворазделочном узле. Типовая инструкция по охране труда ▪ статья Доработка телефона. Энциклопедия радиоэлектроники и электротехники ▪ статья Фотовыключатель освещения. Энциклопедия радиоэлектроники и электротехники
Главная страница | Библиотека | Статьи | Карта сайта | Отзывы о сайте
www.diagram.com.ua |

 Оставьте свой комментарий к этой статье:
Оставьте свой комментарий к этой статье: